Codigo de programacion para seguidor de linea
Codigo de programacion para seguidor de linea online
5 sensores código de seguimiento de línea arduino
Interpretar información presentada de forma visual, oral o cuantitativa (por ejemplo, en tablas, gráficos, diagramas, líneas de tiempo, animaciones o elementos interactivos en páginas web) y explicar cómo la información contribuye a la comprensión del texto en el que aparece.
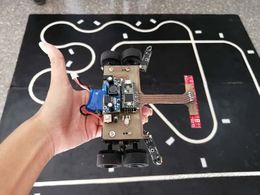
El Bot Seguidor de Líneas utiliza bucles while para controlar sus motores mientras toma la entrada del sensor de infrarrojos para que siga las líneas negras sobre una superficie blanca. Podrás poner este robot sobre una línea dibujada con una cinta eléctrica negra y hacer que siga la línea.
Lo primero que tienes que hacer es incluir la librería Smart Inventor en la parte superior de tu código. A continuación, en el void setup(), configura tus motores, y luego establece los pines 13 y 16 como entradas. Estos son los dos sensores IR de la parte inferior justo al lado del sensor IR del medio.
Incluye el código de abajo en void loop() para que cuando el sensor derecho, pin 16, detecte una línea negra, el motor izquierdo gire en sentido contrario a las agujas del reloj y el motor derecho se detenga. Esto hará que tu robot gire hacia la derecha.
¿Qué está pasando aquí? Cuando la placa Smart Inventor está orientada hacia abajo con el pin 16 (a la derecha) y el pin 13 (a la izquierda) orientados hacia el suelo. Como dijimos en el primer paso, el código le está diciendo a tu robot:
documentación del robot seguidor de línea
Así que habrá sensores de proximidad infrarrojos colocados a ambos lados en la parte delantera del robot. Hay cuatro posibles resultados de los sensores:-Caso 1:-En este caso, ambos sensores no detectan la línea. Los dos motores giran hacia delante. Como resultado, el coche se mueve hacia delante.//Línea no detectada por ninguno
Caso 2:-En este caso, sólo el sensor izquierdo detecta la línea, lo que significa que el coche debe girar hacia la izquierda. El motor izquierdo gira hacia atrás y el derecho hacia adelante. Como resultado, el coche gira a la izquierda.//línea detectada por el sensor izquierdo
Caso 3: En este caso, sólo el sensor derecho detecta la línea, lo que significa que el coche debe girar hacia la derecha. El motor izquierdo gira hacia delante y el derecho hacia atrás. Como resultado, el coche gira a la derecha.//línea detectada por el sensor derecho
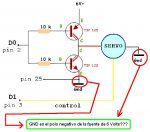
Ahora, monta el cuerpo de tu robot. Cada uno puede tener un chasis diferente. Así que ensambla tu chasis de acuerdo a ello. La mayoría de los chasis vienen con un manual de instrucciones e incluso el mío venía con él, así que échale un vistazo y construye tu chasis en consecuencia. A continuación, fije los componentes al chasis. El Arduino, con el escudo del motor conectado a él y también el soporte de la batería debe ser fijado en el chasis. Asegúrate de que están fijados en las esquinas…Fija también el interruptor…Suelda los cables a los motores y también al interruptor y tenlos preparados…Paso 3: ConexionesEsquema del sensor
robot seguidor de líneas código arduino pdf
El escudo STEM compatible con Arduino tiene un montón de características como un sensor de temperatura, una pantalla de 7 dígitos, botones, zumbadores, etc. para que pueda hacer todo tipo de proyectos con un escudo. ¿Y sabías que incluso puedes hacer un seguidor de líneas? Puedes hacerlo gracias al sensor de luz integrado y al LED IR que están colocados con mucho tacto en una parte separada de la PCB principal que puedes romper. De esta manera, puedes montar el sensor de luz y el LED IR en un punto práctico de tu proyecto de seguidor de línea.
Un seguidor de líneas es un tipo de robot que sigue una línea blanca por sí mismo. El que vamos a hacer utiliza un LED IR que transmitirá luz infrarroja y un sensor de luz que detectará la luz infrarroja reflejada. La luz infrarroja se reflejará bien en una zona blanca o de color claro, pero no en una zona de color oscuro. El sensor de luz comprobará si la luz infrarroja se refleja o no. Si no, significa que no hay línea blanca y el robot irá en círculo hasta que «encuentre» la luz infrarroja reflejada y, por tanto, la línea blanca. Si la luz se refleja, el robot seguirá avanzando en la dirección de la línea blanca.