Como hacer un robot seguidor de linea con arduino
2:54código para el robot seguidor de líneastransformación juvenilyoutube – 1 oct 2016
El Robot Seguidor de Línea o Robot Trazador de Línea o Robot Trazador es un Robot Autónomo que sigue una línea visual o magnética pintada o incrustada en la superficie de locomoción. El Robot Seguidor de Línea es una categoría de un robot móvil que es capaz de moverse en un entorno confiando en dispositivos de guía que les permiten recorrer una ruta de navegación predefinida en un espacio relativamente controlado. Algunos de los vehículos de guiado automático (AGV) utilizan cinta magnética o de color para la ruta de guiado y suelen utilizarse en almacenes para clasificar/cargar de forma autónoma las estanterías de almacenamiento.
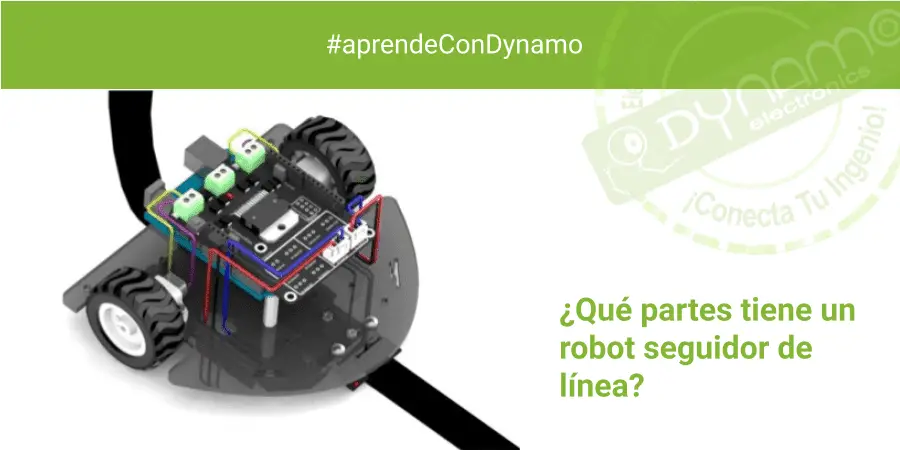
Los Robots Seguidores de Línea son un gran proyecto para cualquiera que esté dando sus primeros pasos en la robótica. El proyecto del Robot Seguidor de Línea / Robot Trazador de Línea da una comprensión detallada de cada componente de un robot móvil como el controlador, los sensores, los actuadores, el sistema de energía y el algoritmo. El controlador es generalmente un microprocesador o microcontrolador. Los sensores dependen de los requisitos y los parámetros de entrada disponibles. Los actuadores suelen ser los motores que mueven el robot. El sistema de alimentación en un robot móvil suele ser de corriente continua y se suministra desde una batería. El algoritmo depende de la aplicación y los requisitos del robot móvil.
Robot seguidor de línea usando arduino nano
RespuestaUpvoteEstoy probando los motores pero no pasa nada. no puede ser el cableado porque hay 4 cables de los motores. he probado tanto la alimentación de 9v como la de 5v. ¿el escudo? no puedo entender cómo usarlo.0caseclick
ReplyUpvoteSí, este concepto podría ser escalado a un robot más grande. La serie Max se ha utilizado para este propósito:http://www.zagrosrobotics.com/shop/item.aspx?itemid=521 Aquí está el proyecto basado en Max:http://www.zagrosrobotics.com/shop/custom.aspx?recid=37In la mayoría de los casos, usted podría utilizar el mismo controlador, controlador de motor y el sensor (sólo tienes que comprobar la corriente y el voltaje nominal)0RedwanK
ReplyUpvote¿Lo has averiguado? La primera secuencia es una calibración. Esa es la repetición derecha-izquierda. Después de que debe empezar a seguir si está cableado correctamente y la calibración fue exitosa.¿Está utilizando el mismo hardware como el instructable? 0VENKATA NAGA DINESH KUMARKPrimalEng
ReplyUpvote¿Qué robot está utilizando? ¿Ha confirmado el sensor qtr está orientado correctamente con los encabezados / cables hacia el centro del bot y el sensor situado en la parte delantera del bot? Cuando usted dice Izquierda izquierda izquierda, ¿se refiere a las correcciones cortas a la izquierda o simplemente girando para siempre a la izquierda? La diferencia en la operación entre la batería vs. Computer powered, es una diferencia en la velocidad solamente? 0HakkıOPrimalEng
Informe del proyecto de robot seguidor de líneas con arduino
Un robot seguidor de líneas, como su nombre indica, es un vehículo guiado automáticamente, que sigue una línea visual incrustada en el suelo o en el techo. Normalmente, la línea visual es el camino que sigue el robot seguidor de líneas y será una línea negra sobre una superficie blanca, pero también es posible el camino inverso (línea blanca sobre una superficie negra). Algunos robots seguidores de líneas avanzados utilizan un campo magnético invisible como trayectoria.
Los grandes robots seguidores de líneas suelen utilizarse en las industrias para ayudar al proceso de producción automatizado. También se utilizan en aplicaciones militares, en la asistencia a personas, en servicios de entrega, etc.
El robot seguidor de línea es uno de los primeros robots con los que los principiantes y los estudiantes tendrían su primera experiencia robótica. En este proyecto, hemos diseñado un simple Robot Seguidor de Línea utilizando Arduino y algunos otros componentes.
Controlador (Arduino UNO): Arduino UNO es el controlador principal del proyecto. Los datos de los sensores (sensores de infrarrojos) se dará a Arduino y le da las señales correspondientes al conductor del motor IC.
10:12cómo hacer un robot seguidor de líneas usando el controlador de motor l293d y …muhammad ansaryoutube – 15 mar 2019
Así que habrá sensores de proximidad infrarrojos colocados a ambos lados en la parte delantera del robot. Hay cuatro posibles resultados de los sensores:-Caso 1:-En este caso, ambos sensores no detectan la línea. Los dos motores giran hacia delante. Como resultado, el coche se mueve hacia delante.//Línea no detectada por ninguno
Caso 2:-En este caso, sólo el sensor izquierdo detecta la línea, lo que significa que el coche debe girar hacia la izquierda. El motor izquierdo gira hacia atrás y el derecho hacia adelante. Como resultado, el coche gira a la izquierda.//línea detectada por el sensor izquierdo
Caso 3: En este caso, sólo el sensor derecho detecta la línea, lo que significa que el coche debe girar hacia la derecha. El motor izquierdo gira hacia delante y el derecho hacia atrás. Como resultado, el coche gira a la derecha.//línea detectada por el sensor derecho
Ahora, monta el cuerpo de tu robot. Cada uno puede tener un chasis diferente. Así que ensambla tu chasis de acuerdo a ello. La mayoría de los chasis vienen con un manual de instrucciones e incluso el mío venía con él, así que échale un vistazo y construye tu chasis en consecuencia. A continuación, fije los componentes al chasis. El Arduino, con el escudo del motor conectado a él y también el soporte de la batería debe ser fijado en el chasis. Asegúrate de que están fijados en las esquinas…Fija también el interruptor…Suelda los cables a los motores y también al interruptor y tenlos preparados…Paso 3: ConexionesEsquema del sensor