Como programar un puente h en arduino
9:50cómo controlar un motor de corriente continua con el driver l298n y el arduino unoeduc8s.tvyoutube – 3 nov 2020
int yAxis = analogRead(A1); // Leer el eje Y del joystickDespués de definir los pines, en la sección del bucle, empezamos con la lectura de los valores del eje X e Y del joystick. El joystick está formado en realidad por dos potenciómetros que se conectan a las entradas analógicas del Arduino y tienen valores de 0 a 1023. Cuando el joystick se mantiene en su posición central el valor de ambos potenciómetros, o ejes, está en torno a 512. Añadiremos un poco de tolerancia y consideraremos los valores de 470 a 550 como centrales. Así que si movemos el eje Y del joystick hacia atrás y el valor es inferior a 470 pondremos el sentido de giro de los dos motores hacia atrás utilizando los cuatro pines de entrada. Entonces, convertiremos los valores decrecientes de 470 a 0 en valores PWM crecientes de 0 a 255 que es en realidad la velocidad del motor.// Eje Y utilizado para el control hacia adelante y hacia atrás
}Similarmente, si movemos el eje Y del joystick hacia adelante y el valor va por encima de 550 configuraremos los motores para que se muevan hacia adelante y convertiremos las lecturas de 550 a 1023 en valores PWM de 0 a 255. Si el joystick se mantiene en su centro la velocidad de los motores será cero.A continuación vamos a ver como utilizamos el eje X para el control izquierdo y derecho del coche.// Eje X utilizado para el control izquierdo y derecho
Puente en h arduino tinkercad
Dirección y velocidad de un motor de corriente continua con un puente H y ArduinoÚltima actualización: 22 de julio de 2021en Control de motores con ArduinoEn este tutorial de Arduino, controlarás la dirección de un motor de corriente continua utilizando un puente H. Los servos son la forma más fácil de empezar a hacer un movimiento con un microcontrolador. Desafortunadamente, los servos no giran 360 grados sino sólo 180. Los motores DC sí tienen la capacidad de girar 360 grados. En el tutorial anterior: Arduino Tutorial 6.3: Driving a brushed DC Motor creamos un código para hacer girar el motor en una dirección. Si usted tomara la energía y la tierra en el motor y cambiara su orientación, el motor giraría en la dirección opuesta. Sin embargo, no es muy conveniente hacer eso cada vez que quieras hacer girar el motor de CC en otra dirección. Por lo tanto, se utilizará un componente llamado puente H para invertir la polaridad del motor.
Con la placa Arduino Uno podrás controlar el puente H con bastante facilidad. En este tutorial, utilizarás el chip H-Bridge l293. Para controlar el sentido de giro del motor de corriente continua, sin intercambiar los cables, puedes utilizar un circuito llamado Puente H. Un puente H es un circuito electrónico que puede conducir el motor en ambas direcciones. Los puentes H se utilizan en muchas aplicaciones diferentes. Una de las aplicaciones más comunes es el control de motores en robots.
Puente en h arduino l293d
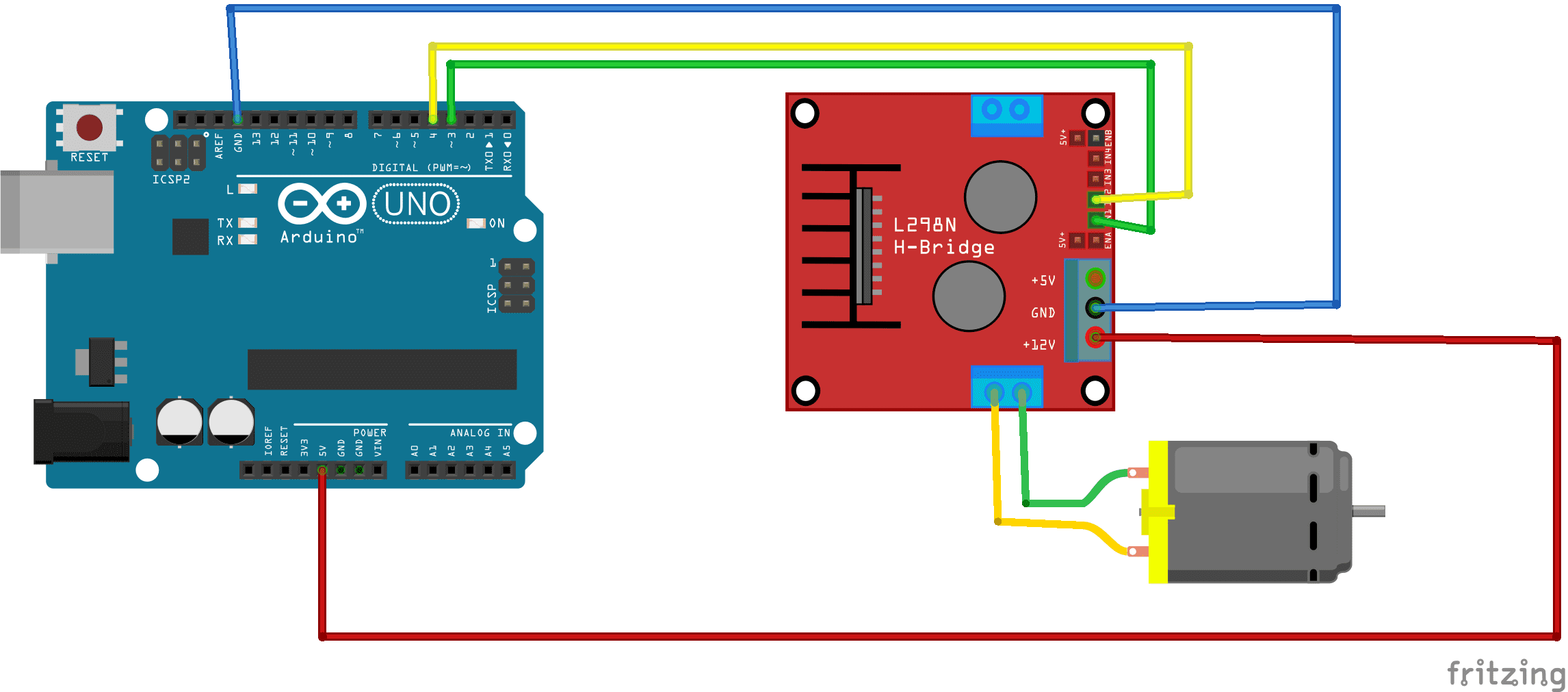
Si planeas trabajar con robots o simplemente construir cosas que se muevan, eventualmente necesitarás aprender a controlar un motor de corriente continua. El económico módulo L298N H-Bridge es una forma sencilla de conseguirlo. Acoplando el L298N H-Bridge a un microcontrolador como un Arduino podrás controlar tanto la velocidad como el sentido de giro de dos motores de corriente continua.
Hoy en día, los motores de corriente continua van desde modelos enormes utilizados en equipos industriales hasta dispositivos diminutos que caben en la palma de la mano. Son baratos y son ideales para usarlos en tus proyectos de robótica, cuadricópteros e Internet de las cosas.
A diferencia de los LED, no puedes simplemente conectar un motor de CC a uno de los pines de salida de tu Arduino o Raspberry Pi y esperar que funcione. Los motores DC tienen requerimientos de corriente y voltaje que están más allá de las capacidades de tu microcontrolador o microcomputadora. Es necesario utilizar alguna electrónica externa para accionar y controlar el motor, y probablemente también necesitarás una fuente de alimentación independiente.
Hay varias formas de accionar un motor de corriente continua desde la salida de tu dispositivo informático. Se puede utilizar un solo transistor para accionar un motor de CC, esto funciona bien siempre que no necesites cambiar la dirección en la que el motor está girando.
36:41controlando motores dc con el puente l298n h y arduinodronebot workshopyoutube – 11 mar 2017
int yAxis = analogRead(A1); // Leer el eje Y del joystickDespués de definir los pines, en la sección del bucle, empezamos con la lectura de los valores del eje X e Y del joystick. El joystick está formado en realidad por dos potenciómetros que se conectan a las entradas analógicas del Arduino y tienen valores de 0 a 1023. Cuando el joystick se mantiene en su posición central el valor de ambos potenciómetros, o ejes, está en torno a 512. Añadiremos un poco de tolerancia y consideraremos los valores de 470 a 550 como centrales. Así que si movemos el eje Y del joystick hacia atrás y el valor es inferior a 470 pondremos el sentido de giro de los dos motores hacia atrás utilizando los cuatro pines de entrada. Entonces, convertiremos los valores decrecientes de 470 a 0 en valores PWM crecientes de 0 a 255 que es en realidad la velocidad del motor.// Eje Y utilizado para el control hacia adelante y hacia atrás
}Similarmente, si movemos el eje Y del joystick hacia adelante y el valor va por encima de 550 configuraremos los motores para que se muevan hacia adelante y convertiremos las lecturas de 550 a 1023 en valores PWM de 0 a 255. Si el joystick se mantiene en su centro la velocidad de los motores será cero.A continuación vamos a ver como utilizamos el eje X para el control izquierdo y derecho del coche.// Eje X utilizado para el control izquierdo y derecho

