Como programar un servomotor en arduino
código del servomotor arduino 360 grados
Algunos de los pines de Arduino pueden ser programados para generar una señal PWM. Podemos controlar el servomotor conectando el pin de señal del servomotor a un pin de Arduino, y programando para generar PWM en el pin de Arduino.
Gracias a la librería Arduino Servo, controlar el servomotor es muy fácil. Incluso NO necesitamos saber cómo funciona el servomotor. Tampoco necesitamos saber cómo generar la señal PWM. Solo necesitamos aprender a usar la librería.
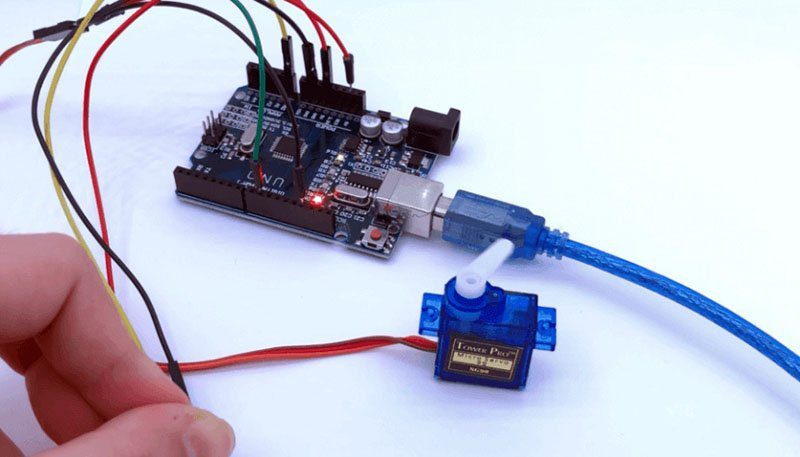
Como podemos ver en el diagrama anterior, el pin VCC del servomotor NO se conecta al pin de 5V de Arduino. Se conecta al pin positivo de una fuente de alimentación extra. El pin negativo de la fuente de alimentación extra se conecta al pin GND de Arduino.
m5stack goplus2 motor de corriente continua y…
Necesito utilizar un servo de rotación continua para un sistema de estabilización de cámara. Mi profesor compró servos que ya han sido modificados para el movimiento continuo – no hay parada en los engranajes, y el potenciómetro le permite girar 360+ grados.
Actualmente estoy utilizando PWM con un Arduino Uno. El servo gira continuamente, pero no de forma estable. También he quitado el potenciómetro en otro de los servos, y en un tercer servo he utilizado un divisor de tensión en lugar del potenciómetro.
Si tus servos son simplemente servos normales modificados para rotación continua, la forma de controlarlos es enviando una señal PWM de 50Hz (20ms de periodo) con un tiempo de nivel alto entre 1ms (a toda la izquierda) y 2ms (a toda la derecha).
Hacer un barrido a través de un rango de valores de PWM no resultará en un movimiento continuo, ya que los tiempos de retardo entre los diferentes valores no están correlacionados con el tiempo requerido para que el servo llegue a la posición dada.
Te sugiero que solo des 2 comandos, el valor mínimo de PWM y el valor máximo de PWM. Esto debería hacer una rotación completa continuamente, si el ciclo de trabajo de tu PWM es proporcional a la posición del motor.
6:30tutorial arduino de control de servomotores múltiplestecnología dpvyoutube – 6 mar 2019
En este tutorial, aprenderás cómo funcionan los servomotores y cómo controlarlos con Arduino. ¡He incluido diagramas de cableado y varios códigos de ejemplo! Los servomotores se utilizan a menudo en proyectos de robótica, pero también puedes encontrarlos en coches RC, aviones, etc. Son muy útiles cuando se necesita un control preciso de la posición y/o un par elevado.
En la primera parte de este artículo, veremos el funcionamiento interno de un servo y qué tipo de señal de control utiliza. También explicaré cuáles son las diferencias entre un servo estándar y uno continuo. A continuación, te mostraré cómo conectar un servomotor al Arduino.
Con el primer ejemplo de código, puedes controlar tanto la posición como la velocidad del servomotor. Después, veremos cómo controlar un servo con un potenciómetro y cómo puedes modificar el código para controlar varios servomotores al mismo tiempo. Por último, al final de este artículo, puedes encontrar las especificaciones y dimensiones de algunos de los servomotores más populares del mercado.
m5stack m5stack goplus2 d…
Un servomotor es un pequeño dispositivo que tiene un eje de salida. Este eje puede ser posicionado en posiciones angulares específicas enviando al servo una señal codificada. Mientras la señal codificada exista en la línea de entrada, el servo mantendrá la posición angular del eje. Si la señal codificada cambia, la posición angular del eje cambia. En la práctica, los servos se utilizan en los aviones de radiocontrol para posicionar superficies de control como los elevadores y los timones. También se utilizan en coches de radiocontrol, marionetas y, por supuesto, robots.
Los servos son muy útiles en robótica. Los motores son pequeños, tienen circuitos de control incorporados y son extremadamente potentes para su tamaño. Un servo estándar, como el Futaba S-148, tiene un par de 42 onzas/pulgadas, que es muy potente para su tamaño. También consume una potencia proporcional a la carga mecánica. Un servo con poca carga, por lo tanto, no consume mucha energía.
Las tripas de un servomotor se muestran en la siguiente imagen. Puedes ver el circuito de control, el motor, un conjunto de engranajes y la carcasa. También puedes ver los 3 cables que se conectan al mundo exterior. Uno es para la alimentación (+5 voltios), tierra, y el cable blanco es el cable de control.