Conectar servo a arduino
proyectos de servomotores arduino
Explicación: El control de los servos no es una tarea fácil, pero por suerte para nosotros, el IDE de Arduino ya contiene una biblioteca muy agradable llamada Servo. Incluye comandos sencillos para que puedas instruir rápidamente al servo para que gire en un ángulo determinado.Si vas a utilizar estos comandos, tienes que decirle al IDE de Arduino que estás utilizando la librería con este comando:#include <Servo. h>Lo siguiente que hacemos es declarar el pin de Arduino al que se conecta el pin de control del servomotor.int servoPin = 9;La siguiente línea crea un objeto servo.Servo servo;En realidad puedes definir hasta ocho servos de esta manera, por ejemplo, si tuviéramos dos servos, entonces podríamos escribir algo así:Servo servo1;
biblioteca de servos de arduino
Algunos de los pines de Arduino pueden ser programados para generar una señal PWM. Podemos controlar el servomotor conectando el pin de señal del servomotor a un pin de Arduino, y programando para generar PWM en el pin de Arduino.
Gracias a la librería Arduino Servo, controlar el servomotor es muy fácil. Incluso NO necesitamos saber cómo funciona el servomotor. Tampoco necesitamos saber cómo generar la señal PWM. Solo necesitamos aprender a usar la librería.
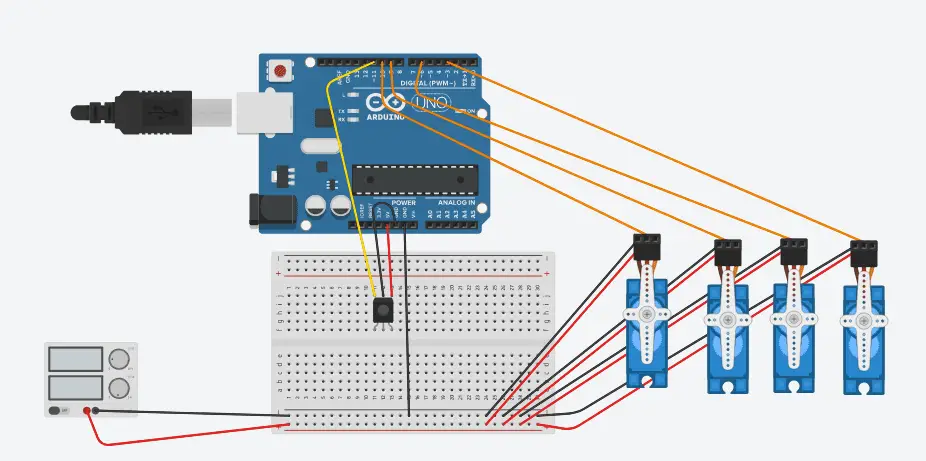
Como podemos ver en el diagrama anterior, el pin VCC del servomotor NO se conecta al pin de 5V de Arduino. Se conecta al pin positivo de una fuente de alimentación extra. El pin negativo de la fuente de alimentación extra se conecta al pin GND de Arduino.
servomotor arduino uno
En este tutorial aprenderás todo lo que necesitas saber sobre las funcionalidades de un servomotor.Primero aprenderemos los fundamentos teóricos de cómo funciona un servomotor.En múltiples ejemplos aprenderás a controlar uno o varios servos con tu microcontrolador Arduino, ESP8266 o ESP32.
Un servomotor es un motor eléctrico que puede controlar con precisión la posición del ángulo, la velocidad y la aceleración. Por lo tanto, el motor está utilizando un mecanismo de retroalimentación de bucle cerrado. Un Servo consiste en las siguientes partes:
Como se mencionó al principio de este tutorial el servomotor utiliza un sistema de retroalimentación de lazo cerrado para controlar la posición del ángulo, la velocidad y la aceleración. La siguiente imagen muestra el lazo cerrado.
La entrada para el controlador es una señal de pulso, que será proporcionada por nuestro microcontrolador en los siguientes ejemplos de este tutorial. La señal de pulso define el ajuste de posición para el servo que resulta en un comando de velocidad y finalmente en un comando de corriente que es la entrada para que el inversor gire el motor en la dirección preferida.
código del servomotor
Un servomotor es un pequeño dispositivo que tiene un eje de salida. Este eje puede ser posicionado en posiciones angulares específicas enviando al servo una señal codificada. Mientras la señal codificada exista en la línea de entrada, el servo mantendrá la posición angular del eje. Si la señal codificada cambia, la posición angular del eje cambia. En la práctica, los servos se utilizan en los aviones de radiocontrol para posicionar superficies de control como los elevadores y los timones. También se utilizan en coches de radiocontrol, marionetas y, por supuesto, robots.
Los servos son muy útiles en robótica. Los motores son pequeños, tienen circuitos de control incorporados y son extremadamente potentes para su tamaño. Un servo estándar, como el Futaba S-148, tiene un par de 42 onzas/pulgadas, que es muy potente para su tamaño. También consume una potencia proporcional a la carga mecánica. Un servo con poca carga, por lo tanto, no consume mucha energía.
Las tripas de un servomotor se muestran en la siguiente imagen. Puedes ver el circuito de control, el motor, un conjunto de engranajes y la carcasa. También puedes ver los 3 cables que se conectan al mundo exterior. Uno es para la alimentación (+5 voltios), tierra, y el cable blanco es el cable de control.

