Control de motor con sensor ultrasonico arduino
sensor ultrasónico con código de servomotor
El HC-SR04 es un sensor de distancia ultrasónico económico y fácil de usar, con un alcance de 2 a 400 cm. Se utiliza habitualmente en robots que evitan obstáculos y en proyectos de automatización. En este tutorial, aprenderás cómo funciona el sensor y cómo utilizarlo con Arduino.
He incluido 5 ejemplos con un diagrama de cableado y código para que puedas empezar a experimentar con el sensor. Primero veremos un ejemplo que no utiliza una biblioteca de Arduino. A continuación, le mostraré cómo puede utilizar la biblioteca NewPing para crear un código más compacto.
Los sensores ultrasónicos de distancia/proximidad baratos son geniales, pero en algunos proyectos, puede que necesites un sensor resistente al agua como el JSN-SR04T o un sensor IR que no se vea influenciado por los cambios de temperatura. En ese caso, los artículos siguientes pueden ser útiles:
Los sensores ultrasónicos funcionan emitiendo ondas sonoras con una frecuencia demasiado alta para que el ser humano las oiga. Estas ondas sonoras viajan por el aire con la velocidad del sonido, aproximadamente 343 m/s. Si hay un objeto delante del sensor, las ondas sonoras se reflejan y el receptor del sensor ultrasónico las detecta. Midiendo el tiempo transcurrido entre el envío y la recepción de las ondas sonoras, se puede calcular la distancia entre el sensor y el objeto.
sensor ultrasónico motor dc código arduino
La robótica con Arduino es una serie de artículos que relatan la construcción de mi primer robot autónomo, Clusterbot. Esta construcción pretende ser asequible, relativamente fácil e instructiva. El coste total de la construcción es de unos 50 dólares.
Hay muchas definiciones diferentes para la palabra robot. Mi opinión personal es que para que una máquina se considere un robot, tiene que ser capaz de percibir y reaccionar a un entorno dinámico, con poca o ninguna intervención humana. Según esta definición, Clusterbot sigue siendo una máquina, pero ahora vamos a convertirlo en un robot.
controla el motor paso a paso con un sensor de ultrasonidos
Emite un ultrasonido a 40 000 Hz que viaja a través del aire y si hay un objeto u obstáculo en su camino rebotará hacia el módulo. Teniendo en cuenta el tiempo de viaje y la velocidad del sonido se puede calcular la distancia.
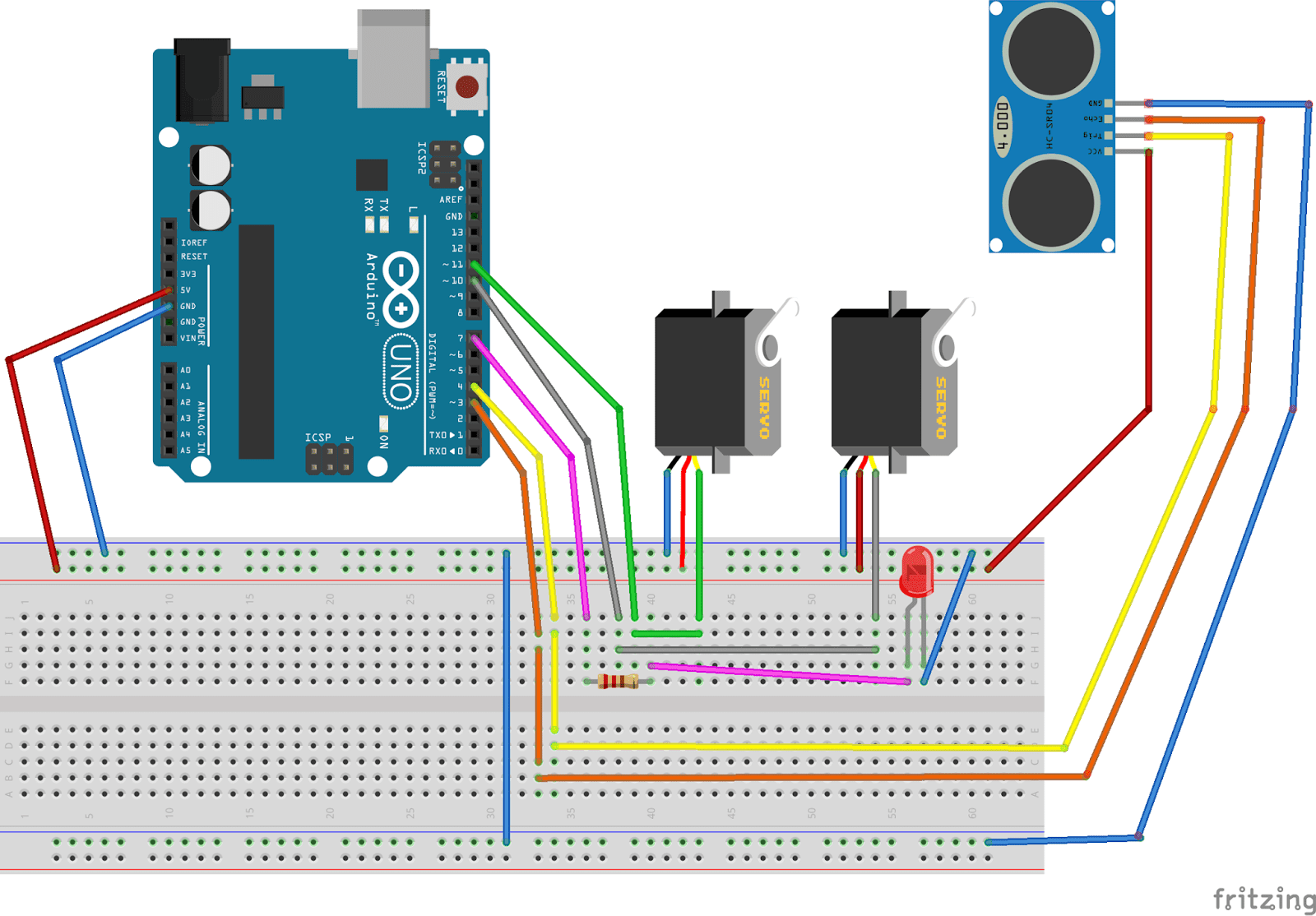
El módulo ultrasónico HC-SR04 tiene 4 pines, tierra, VCC, Trig y Echo. Los pines de tierra y VCC del módulo deben conectarse a la tierra y a los pines de 5 voltios de la placa Arduino respectivamente y los pines de trig y eco a cualquier pin de E/S digital de la placa Arduino.
Para generar el ultrasonido necesitas poner el Trig en un estado alto durante 10 µs. Esto enviará una ráfaga de ultrasonidos de 8 ciclos que viajará a la velocidad del sonido y se recibirá en el pin Echo. El pin Echo emitirá el tiempo en microsegundos que viajó la onda sonora.
Por ejemplo, si el objeto está a 10 cm del sensor, y la velocidad del sonido es de 340 m/s o 0,034 cm/µs, la onda sonora tendrá que viajar unos 294 u segundos. Sin embargo, lo que obtendrá el pasador del Eco será el doble de esa cifra porque la onda sonora necesita viajar hacia adelante y rebotar hacia atrás. Así que para obtener la distancia en cm necesitamos multiplicar el valor del tiempo de viaje recibido desde la clavija del eco por 0,034 y dividirlo por 2.
código arduino para probar el sensor ultrasónico
Los motores de corriente continua son aparatos cómodos y de gran eficiencia y par que los hacen ideales para la robótica. Incorporan dos cables, un terminal negativo y otro positivo, que harán girar el motor una vez conectado a la batería directamente. Por otro lado, el sensor ultrasónico es un gadget que utiliza ondas sonoras para medir la distancia a la que se encuentra un objeto.
Al realizar esta conexión, también se necesita un CI de controlador de motor L293 que actúa como interfaz entre los motores del robot y los microprocesadores del mismo. Los dos circuitos integrados de controladores de motor más populares son los de la serie L293, como el L293NE y el L293D. Estos controladores de motor llevan integrados dos puentes H, el circuito más sencillo que permite controlar el motor de baja intensidad.
Pero, ¿cómo se controla el motor de corriente continua con el sensor de ultrasonidos mediante el arduino? Si esto es lo que estás tratando de aprender, y este artículo detallado es la guía perfecta en todo lo que necesita saber sobre cómo hacer esta operación posible.
El módulo de rango ultrasónico tiene una funcionalidad de medición sin contacto de 2cm a 400cm que tiene una precisión de rango que puede alcanzar un máximo de 3mm. Todos los módulos HC-SR04 incluyen un circuito de control, un receptor y un transmisor ultrasónico.