Control de servos con arduino
Control de servos con arduino del momento
servomotor código arduino 90 grados
En este tutorial, aprenderás cómo funcionan los servomotores y cómo controlarlos con Arduino. He incluido diagramas de cableado y varios códigos de ejemplo. Los servomotores se utilizan a menudo en proyectos de robótica, pero también se pueden encontrar en los coches RC, aviones, etc. Son muy útiles cuando se necesita un control preciso de la posición y/o un par elevado.
En la primera parte de este artículo, veremos el funcionamiento interno de un servo y qué tipo de señal de control utiliza. También explicaré cuáles son las diferencias entre un servo estándar y uno continuo. A continuación, te mostraré cómo conectar un servomotor al Arduino.
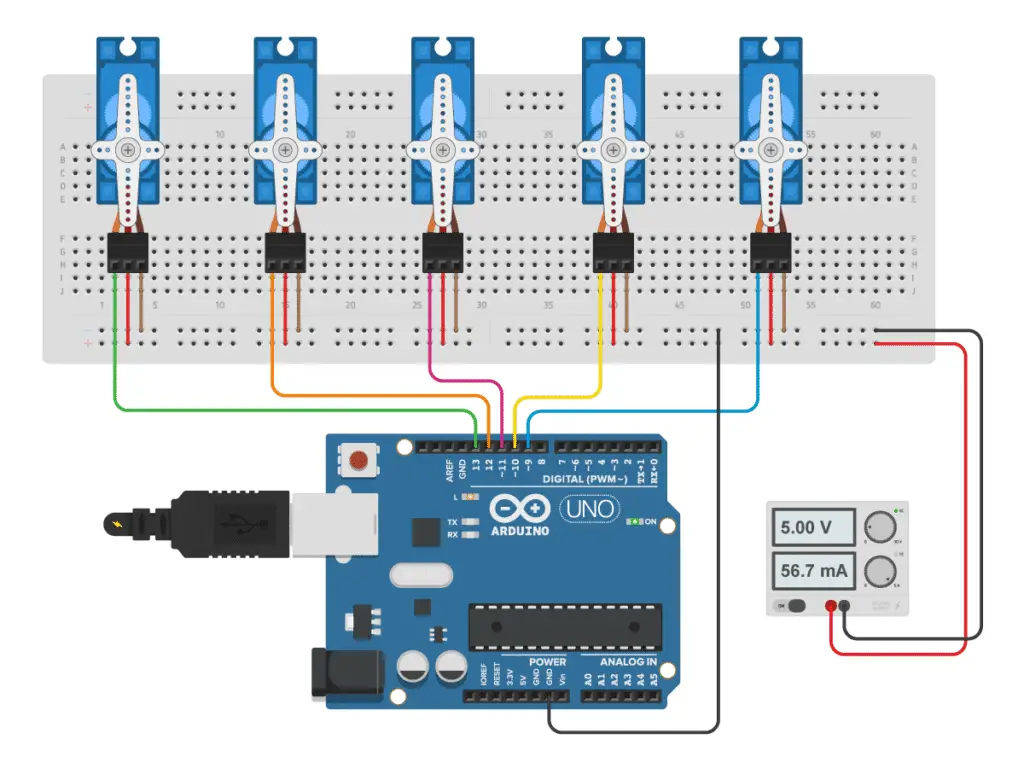
Con el primer ejemplo de código, puedes controlar tanto la posición como la velocidad del servomotor. Después, veremos cómo controlar un servo con un potenciómetro y cómo puedes modificar el código para controlar varios servomotores al mismo tiempo. Por último, al final de este artículo, puedes encontrar las especificaciones y dimensiones de algunos de los servomotores más populares del mercado.
clavijas del servomotor
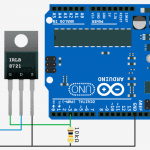
Controlar servomotoresAbrir Live ScriptEste ejemplo muestra cómo utilizar el paquete de soporte de MATLAB® para el hardware de Arduino® para controlar un servomotor aficionado.Configuración del hardwareConecta un servomotor FS5106B al hardware de Arduino,Crea un objeto servo y calibra el motorCrea un objeto arduino e incluye la librería Servo. a = arduino();O bien, puedes especificarlo explícitamente en el par Nombre-Valor de la librería en la creación del objeto arduino.Borra a;
Comprueba los valores del rango de ancho de pulso de la hoja de datos de tu servomotor para calibrar el motor para que gire en el rango esperado. Este ejemplo utiliza 700*10^-6 y 2300*10^-6 para que el motor se mueva de 0 a 180 grados.clear s;
Escribir y leer la posición del servoCambia la posición del eje del servomotor de 0(mínimo) a 1(máximo) con un incremento de 0.2, por ejemplo 36 grados. Muestra la posición actual cada vez que la posición cambia.for angle = 0:0.2:1
proyectos de servomotores arduino
Hemos construido algunos proyectos que han utilizado motores para hacer que las cosas se muevan y en el camino hemos visto algunos de los diferentes tipos de motores que podemos controlar con nuestros proyectos de Arduino y Raspberry Pi.
Hemos trabajado con motores básicos de corriente continua unas cuantas veces. Construimos un par de proyectos de robótica que se basan en motores de CC y también echamos un vistazo extenso al controlador de puente H que se utiliza comúnmente para regular la velocidad y la dirección de un motor de CC con un microcontrolador o microordenador.
Otro tipo de motor con el que hemos trabajado es el motor paso a paso. Este tipo de motor tiene su eje impulsado en pasos discretos, lo que permite un control muy preciso. Son muy utilizados en diseños de impresoras y robótica.
Un servomotor es un motor de baja velocidad y alto par que viene en una variedad de tamaños. A diferencia de los motores de corriente continua y de los motores paso a paso, el servomotor no suele girar 360 grados. En cambio, está limitado a un rango de 180, 270 o 90 grados.
Una señal de control es enviada al servo para posicionar el eje en el ángulo deseado. Esta disposición con una sola señal hace que los servos sean sencillos de utilizar en diseños de radio y control remoto, así como con microcontroladores.