Control de velocidad de un motor dc arduino
Control de velocidad de motores de corriente continua en arduino usando código pwm
En este tutorial de Arduino aprenderemos a controlar motores de corriente continua usando Arduino. Veremos algunas técnicas básicas para el control de motores de corriente continua y haremos dos ejemplos con los que aprenderemos a controlar motores de corriente continua utilizando el driver de motor L298N y la placa Arduino.
PWM, o modulación por ancho de pulso es una técnica que nos permite ajustar el valor medio de la tensión que va al dispositivo electrónico encendiendo y apagando la energía a un ritmo rápido. La tensión media depende del ciclo de trabajo, o de la cantidad de tiempo que la señal está encendida frente a la cantidad de tiempo que la señal está apagada en un solo período de tiempo.
Así que, dependiendo del tamaño del motor, podemos simplemente conectar una salida PWM de Arduino a la base del transistor o a la puerta de un MOSFET y controlar la velocidad del motor controlando la salida PWM. La señal PWM de Arduino de baja potencia enciende y apaga la puerta del MOSFET a través de la cual se acciona el motor de alta potencia.
Por otro lado, para controlar el sentido de giro, sólo necesitamos invertir la dirección del flujo de corriente a través del motor, y el método más común de hacerlo es utilizando un Puente H. Un circuito H-Bridge contiene cuatro elementos de conmutación, transistores o MOSFETs, con el motor en el centro formando una configuración en forma de H. Activando dos conmutadores particulares al mismo tiempo podemos cambiar la dirección del flujo de corriente, cambiando así el sentido de rotación del motor.
Control de velocidad de un motor de corriente continua mediante arduino y l293d
En este tutorial de Arduino aprenderemos a controlar motores de corriente continua utilizando Arduino. Veremos algunas técnicas básicas para el control de motores de corriente continua y haremos dos ejemplos con los que aprenderemos a controlar motores de corriente continua utilizando el driver de motor L298N y la placa Arduino.
PWM, o modulación por ancho de pulso es una técnica que nos permite ajustar el valor medio de la tensión que va al dispositivo electrónico mediante el encendido y apagado de la energía a un ritmo rápido. La tensión media depende del ciclo de trabajo, o de la cantidad de tiempo que la señal está encendida frente a la cantidad de tiempo que la señal está apagada en un solo período de tiempo.
Así que, dependiendo del tamaño del motor, podemos simplemente conectar una salida PWM de Arduino a la base del transistor o a la puerta de un MOSFET y controlar la velocidad del motor controlando la salida PWM. La señal PWM de Arduino de baja potencia enciende y apaga la puerta del MOSFET a través de la cual se acciona el motor de alta potencia.
Por otro lado, para controlar el sentido de giro, sólo necesitamos invertir la dirección del flujo de corriente a través del motor, y el método más común de hacerlo es utilizando un Puente H. Un circuito H-Bridge contiene cuatro elementos de conmutación, transistores o MOSFETs, con el motor en el centro formando una configuración en forma de H. Activando dos conmutadores particulares al mismo tiempo podemos cambiar la dirección del flujo de corriente, cambiando así el sentido de rotación del motor.
Control de la velocidad del motor de cc de arduino con potenciómetro
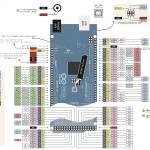
El tipo de motor de corriente continua, como se puede ver en el diagrama del circuito dado a continuación, tiene un codificador incorporado. Por lo tanto, es totalmente a usted si usted quiere usarlo como el motor de corriente continua simple o desea utilizar el codificador, o puede utilizar el motor y el codificador juntos al mismo tiempo. Como puedes ver en el diagrama del circuito, los cables de alimentación que son los cables Rojo y Negro no están conectados pero los cables del codificador sí. Para este primer ejemplo, sólo usaremos el encoder para entender lo básico, de esta manera entenderás fácilmente cómo funciona un encoder. Entonces, giraremos el eje del motor a mano para ver las señales de disparo.
Un encoder funciona observando los cambios en el campo magnético creado por un imán unido al eje del motor, a medida que el motor gira las salidas del encoder se disparan periódicamente. Cuando el imán gira en el sentido de las agujas del reloj, la salida «a» se dispara primero, y cuando gira en sentido contrario a las agujas del reloj se dispara la salida «b». De este modo, sabrás exactamente en qué sentido está girando el eje del motor. Esto puede ser muy útil en situaciones en las que se necesita controlar el movimiento de avance y retroceso del motor de CC.
Pulsador de control de motor de corriente continua arduino
Dirección y velocidad de un motor de corriente continua con un puente H y ArduinoÚltima actualización: 22 de julio de 2021en Control de motores con ArduinoEn este tutorial de Arduino, controlarás la dirección de un motor de corriente continua utilizando un puente H. Los servos son la forma más fácil de empezar a hacer un movimiento con un microcontrolador. Desafortunadamente, los servos no giran 360 grados sino sólo 180. Los motores DC sí tienen la capacidad de girar 360 grados. En el tutorial anterior: Arduino Tutorial 6.3: Driving a brushed DC Motor creamos un código para hacer girar el motor en una dirección. Si usted tomara la energía y la tierra en el motor y cambiara su orientación, el motor giraría en la dirección opuesta. Sin embargo, no es muy conveniente hacer eso cada vez que quieras hacer girar el motor de CC en otra dirección. Por lo tanto, se utilizará un componente llamado puente H para invertir la polaridad del motor.
Con la placa Arduino Uno podrás controlar el puente H con bastante facilidad. En este tutorial, utilizarás el chip H-Bridge l293. Para controlar el sentido de giro del motor de corriente continua, sin intercambiar los cables, puedes utilizar un circuito llamado Puente H. Un puente H es un circuito electrónico que puede conducir el motor en ambas direcciones. Los puentes H se utilizan en muchas aplicaciones diferentes. Una de las aplicaciones más comunes es el control de motores en robots.