Encender un motor dc con arduino
controlar un motor de corriente continua con arduino
Para controlar un motor de corriente continua en dos direcciones, necesitas un puente H. Un puente H tiene dos entradas: si una entrada es alta y la otra baja, el motor girará en una dirección, si la otra es alta, y la primera baja, girará en la otra dirección. Si las dos entradas son bajas o altas, el motor estará apagado.
Para cada uno de estos 16 motores, la tensión de funcionamiento está entre 3V-9V y cada uno tiene una corriente en vacío de 30 mA y una corriente de parada de 500 mA. Quiero ser capaz de operar los motores de corriente continua en cerca de 3V porque los motores se describen para operar en alrededor de 48 rpm en este voltaje que es ideal para mi proyecto.
Necesitarás una fuente de alimentación apropiada (~3V) con al menos suficiente capacidad de corriente para hacer funcionar todos los motores. Un diseño adecuado permitiría la corriente de parada completa (que puede ocurrir en la puesta en marcha, incluso sin carga) y si usted está funcionando todos los motores a la vez que es de 8 amperios. En realidad los motores probablemente no utilizarán 500mA con los 3V reducidos, así que puedes tomar algún «riesgo» con una fuente de alimentación más pequeña si quieres.
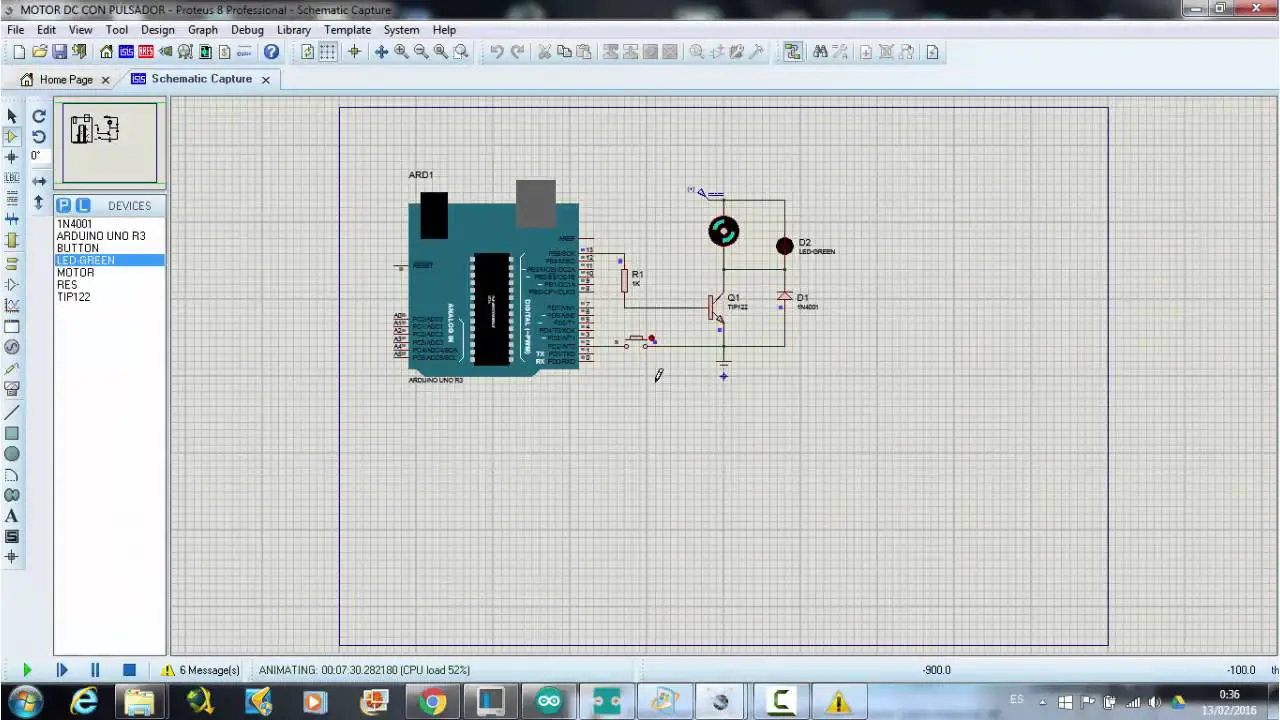
circuito de motor de corriente continua en arduino
Como se ha descrito anteriormente, cuando el polo de potencia se intercambia entre dos cables del motor de CC, la dirección de rotación se invierte. Este método se utiliza para controlar la dirección del motor de CC. Por supuesto, no cambiando manualmente sino mediante programación.
Si proporcionamos energía a los motores de CC por debajo de 12V, el motor sigue girando pero no a la máxima velocidad. Esto significa que si cambiamos el voltaje de la fuente de alimentación, podemos cambiar la velocidad del motor DC. Sin embargo, este método no se utiliza en la práctica debido a la dificultad de controlar la tensión de la fuente de alimentación. En su lugar, fijamos la tensión de la fuente de alimentación y controlamos la velocidad del motor de CC mediante una señal PWM. Cuanto mayor sea el ciclo de trabajo del PWM, mayor será la velocidad de giro del motor de CC.
El control del motor de CC incluye dos factores: la velocidad y la dirección. Arduino puede generar la señal PWM. Sin embargo, esta señal PWM tiene bajo voltaje y corriente, no podemos utilizarla para controlar el motor de CC. Tenemos que utilizar un controlador de hardware entre Arduino y el motor de CC. El conductor hace dos trabajos:
control de la dirección del motor de corriente continua en el código del arduino
Si quieres arrancar suavemente a un nivel de potencia alto, empieza con el voltaje de arranque y luego sube suavemente desde ahí hasta la potencia máxima durante 10-100 milisegundos. Si tu carga tiene una gran inercia, como un volante de inercia, puedes utilizar un período de rampa más largo.
Cada vez que se haga un bucle, compare el pwm con su variable de velocidad. Si es menor, increméntalo; si es mayor, disminúyelo. Usa pwm en tu declaración analogWrite. Retrasa por ejemplo 50ms al final del bucle. Afina el retardo hasta que el motor actúe como necesitas.
Tal vez podamos incluir este valor alto de PWM en el código, algo como si speed>10 (solo un valor de ejemplo) entonces speed=150 (hus un valor de ejemplo) durante 10ms y luego speed de nuevo = map(pot_pin,0,1023,0,255);
Cada vez que se haga el bucle, compara el pwm con tu variable de velocidad. Si es menor, increméntalo; si es mayor, disminúyelo. Usa pwm en tu declaración analogWrite. Retrasa por ejemplo 50ms al final del bucle. Ajusta el retardo hasta que el motor actúe como necesitas.
Si la variable de velocidad viene del potenciómetro no veo ningún valor en el intervalo de 50ms – el usuario podría simplemente girar el pote más lentamente. De hecho, introducir un intervalo puede ser más probable que el usuario aplique demasiado acelerador.
arduino motor de corriente continua hacia delante y hacia atrás
El Arduino siempre se ha utilizado para controlar motores. Algunos ejemplos serían el motor de corriente continua, el servomotor y el motor paso a paso. Hoy, vamos a cubrir 2 motores, DC y Servo Motor, que son ampliamente utilizados por muchos aficionados a la electrónica y los fabricantes debido a su simplicidad y funciones.
El Arduino siempre ha sido popular cuando se trata de ejecutar los motores y hoy acabamos de cubrir dos de ella que es usarla para ejecutar un motor de CC y un servomotor. Si usted tiene alguna pregunta sobre cómo conducir un motor de corriente continua o servo usando Arduino, por favor no dude en dejarlos abajo en los comentarios.

