Evasor de obstaculos con arduino
robot para evitar obstáculos código arduino pdf
Aquí se ha diseñado un sencillo proyecto de Robot Evitador de Obstáculos. La robótica es un campo interesante y de rápido crecimiento. Siendo una rama de la ingeniería, las aplicaciones de la robótica están aumentando con el avance de la tecnología.
Hay muchos tipos de técnicas de navegación de robots móviles como la planificación de rutas, la auto-localización y la interpretación de mapas. Un Robot Evitador de Obstáculos es un tipo de robot móvil autónomo que evita la colisión con obstáculos inesperados.
El sensor ultrasónico tiene 4 pines: Vcc, Trig, Echo y Gnd. Vcc y Gnd se conectan a los pines +5v y GND del Arduino. Trig (Disparo) se conecta al 9º pin y Echo se conecta al 8º pin del Arduino UNO respectivamente.
Un servomotor se utiliza para girar el sensor ultrasónico para buscar obstáculos. Tiene tres pines: Control, VCC y GND. El pin de control del servo está conectado al pin 11 de Arduino mientras que el VCC y GND están conectados a +5V y GND.
El L293D es un CI de 16 pines. Los pines 1 y 9 son los pines de habilitación. Estos pines están conectados a +5V. Los pines 2 y 7 son las entradas de control del microcontrolador para el primer motor. Están conectados a los pines 6 y 7 de Arduino respectivamente.
robot para evitar obstáculos – código de arduino
Como se muestra arriba, se utilizaron cinco sensores ultrasónicos de bajo coste HC-SR04 para la detección de objetos en la dirección frontal, derecha, trasera, izquierda y abajo. El microcontrolador Arduino actúa como procesador para recibir los datos del sensor y generar las respuestas correspondientes. Se utilizó Arduino Nano por su pequeño tamaño y su peso relativamente más ligero. Se esbozaron las conexiones de Arduino con todos los sensores y se dibujó el diagrama completo del circuito.
El sistema se conectó a la FC a través del puerto serie de telemetría. 5V y tierra completan el circuito de alimentación para alimentar el Arduino Nano, mientras que el pin transmisor (TX) del FC se conectó al pin receptor (RX) del Arduino Nano. Del mismo modo, el pin RX de la FC se conectó al pin TX del Arduino.
Los puntos de conexión necesarios se soldaron con precisión y firmeza en una placa de cobre. Se utilizaron puentes para facilitar las conexiones y se soldaron los pines de la cabecera hembra para la instalación de los sensores ultrasónicos en cada dirección, como se muestra a continuación. se añadieron condensadores y resistencias para mejorar la consistencia de cada sensor.
robot para evitar obstáculos usando el escudo de motor de arduino
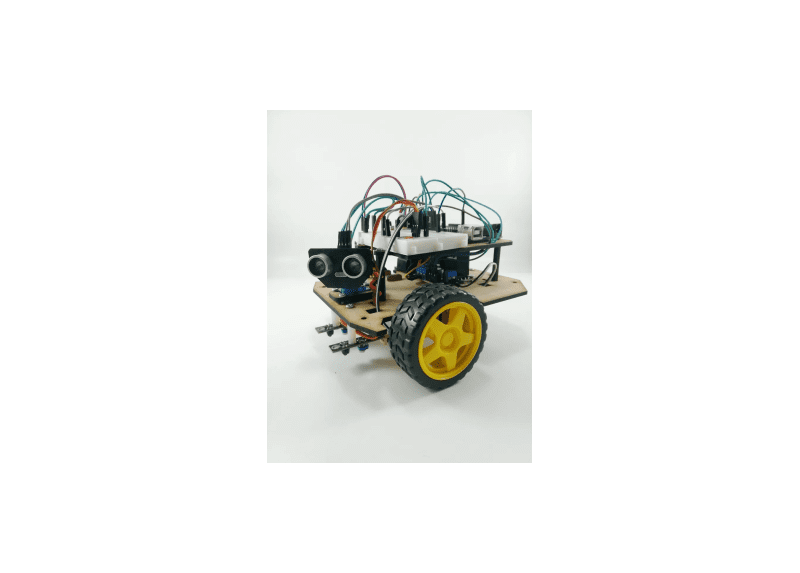
Coche robot Arduino con evasión de obstáculosarduinoprojectCoche robot Arduino con evasión de obstáculos. Siempre me han entusiasmado los coches autónomos y los coches de juguete radiocontrolados, así que ya era hora de que construyera el mío propio con un Arduino Nano. El coche terminado tiene dos modos. El primero es el modo manual que permite conducirlo de forma inalámbrica desde un Arduino UNO y un escudo de joystick. El segundo es el modo autónomo que conduce el coche continuamente hacia delante y evita los obstáculos deteniéndose y apartándose inmediatamente. Los obstáculos son detectados por el sensor de ultrasonidos colocado en la parte delantera del coche.
No quería dedicar demasiado tiempo a la construcción del chasis, así que decidí comprar un kit de coche robot en ebay. Después de ensamblar el kit soldé los cables a los motores y atornillé el soporte de la batería 4xAA, entonces estaba listo para añadir la electrónica Arduino.
Accionar los motores desde el Arduino no es posible, ya que consumen demasiada corriente, por lo que se necesita una unidad de accionamiento del motor por separado para ayudar al Arduino. Compré un bonito módulo L298N rojo en ebay. Así es como se ve:
arduino coche robot 4×4 que evita obstáculos con código fuente
Ahora que el robot tiene su cerebro (Arduino montado en la parte trasera del robot) y un cuerpo, necesita un «sistema nervioso», líneas de comunicación que permitan al cerebro transmitir señales hacia y desde las diferentes partes de su cuerpo. En el contexto de este proyecto, esas líneas de comunicación son los cables que necesitamos conectar entre las diferentes partes del robot que estamos construyendo.
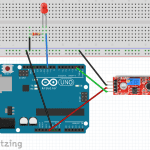
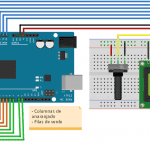
Antes de conectar cualquier cable o componente, es una buena práctica diseñar el diagrama del circuito. Para todos mis proyectos de Arduino, utilizo un software llamado Fritzing, pero incluso puedes planificar tus circuitos a mano.
Para probar la conexión de tu motor, tendrás que conectar la pila de 9V (la que está en la parte trasera del robot, entre las piezas de la base superior e inferior) a la protoboard de 400 puntos sin soldadura, como se muestra en el diagrama del circuito.
Mientras se ejecuta el programa, haz clic en la lupa de la esquina superior derecha del IDE de Arduino. Deberías ver las distancias de cada sensor al objeto más cercano (en pulgadas). Si agitas la mano delante de los sensores, puedes ver cómo cambian las lecturas.