Libreria pid arduino tutorial
Biblioteca arduino pid controlador de temperatura
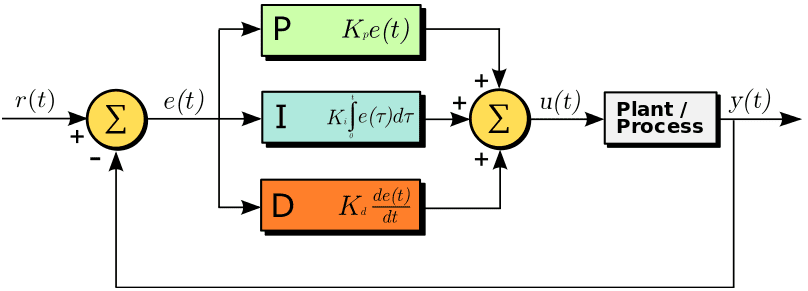
En los sistemas de control, un controlador corrige la salida de un sistema particular a una entrada deseada en presencia de errores y perturbaciones. El tipo más popular de controlador es el PID que es un acrónimo de Proporcional, Integral y Derivativo. En este tutorial de control PID de Arduino, te mostraré cómo puedes emplear un controlador de este tipo en tu proyecto.
Como se ha mencionado, PID es la abreviatura de proporcional, integral y derivativo. El nombre proviene de los métodos de cómo tal controlador se ocupa de las perturbaciones en el sistema. Sin embargo, este tipo de controlador es sólo en los sistemas de retroalimentación. Sugiero la lectura de un material específicamente escrito para este tema, pero haré mi mejor esfuerzo para explicarlo aquí tan simple como pueda.
Usted quiere mantener la temperatura en el horno a un cierto punto de ajuste. Un sensor instalado en el horno determina la temperatura en cada momento. Este sensor, en este caso, proporciona la retroalimentación como referencia sobre el aumento o disminución de la temperatura requerida. La diferencia entre el valor del sensor de retroalimentación y un punto de ajuste de temperatura es el error.
Pid arduino
Junto con el lanzamiento de la nueva librería PID de Arduino he decidido lanzar esta serie de posts. La última biblioteca, aunque sólida, no venía realmente con ninguna explicación del código. Esta vez el plan es explicar con gran detalle por qué el código es como es. Espero que esto sea de utilidad para dos grupos de personas:
Va a ser un trabajo duro, pero creo que he encontrado una forma no demasiado dolorosa de explicar mi código. Voy a empezar con lo que llamo «El PID del principiante». Luego lo mejoraré paso a paso hasta que tengamos un algoritmo pid eficiente y robusto.
Compute() se llama de forma regular o irregular, y funciona bastante bien. Sin embargo, esta serie no se trata de «funciona bastante bien». Si vamos a convertir este código en algo a la par con los controladores PID industriales, tendremos que abordar algunas cosas:
Una vez que hayamos abordado todas estas cuestiones, tendremos un sólido algoritmo PID. También, no por casualidad, tendremos el código que se utiliza en la última versión de la biblioteca PID de Arduino. Así que si estás tratando de escribir tu propio algoritmo, o tratando de entender lo que está pasando dentro de la biblioteca PID, espero que esto te ayude. Empecemos.
Biblioteca arduino-pid github
En los sistemas de control, un controlador corrige la salida de un sistema particular a una entrada deseada en presencia de errores y perturbaciones. El tipo más popular de controlador es el PID que es un acrónimo de Proporcional, Integral y Derivativo. En este tutorial de control PID de Arduino, te mostraré cómo puedes emplear un controlador de este tipo en tu proyecto.
Como se ha mencionado, PID es la abreviatura de proporcional, integral y derivativo. El nombre proviene de los métodos de cómo tal controlador se ocupa de las perturbaciones en el sistema. Sin embargo, este tipo de controlador es sólo en los sistemas de retroalimentación. Sugiero la lectura de un material específicamente escrito para este tema, pero haré mi mejor esfuerzo para explicarlo aquí tan simple como pueda.
Usted quiere mantener la temperatura en el horno a un cierto punto de ajuste. Un sensor instalado en el horno determina la temperatura en cada momento. Este sensor, en este caso, proporciona la retroalimentación como referencia sobre el aumento o disminución de la temperatura requerida. La diferencia entre el valor del sensor de retroalimentación y un punto de ajuste de temperatura es el error.
Código pid de arduino sin librería
Así que ahora que sabemos cómo leer la temperatura real, vamos a montar el siguiente esquema y controlar la potencia aplicada a la resistencia con un MOSFET. Vuelvo a montar el circuito en una protoboard y subo el siguiente código. Este segundo código tiene el algoritmo PID ya creado. Leemos la temperatura, calculamos el error, sumamos los valores del PID y creamos una señal PWM en el pin digital D3 que se aplicará al MOSFET. Pongo la temperatura deseada en 100 grados y uso la pantalla LCD para imprimir el valor establecido y la temperatura real.
Ok así que el código de abajo es un poco grande. Pero no te preocupes. Es muy fácil. Establecemos un punto de ajuste variable a 100 grados para este ejemplo. Luego leemos el valor de la temperatura real del termopar como en el ejemplo anterior. Luego usamos 3 constantes y calculamos la suma del PID. Dependiendo de ese valor creamos una señal PWM en el pin D3 y la aplicamos a la puerta del MOSFET usando un driver BJT.
Como puedes ver la temperatura se mantiene en ese valor. Pero eso es después de probar un montón de constantes PID y esa es la parte complicada de este proyecto. Así que, lo que tendrás que hacer es probar tus propios valores hasta que consigas los correctos. Te aconsejo que comiences con los valores I y D iguales a 0 y luego incrementes esos valores lentamente hasta que obtengas buenos resultados.