Medidor de rpm con arduino
Tacómetro digital arduino
En este tutorial, aprenda a interconectar el módulo de sensor IR con Arduino o ESP8266 o ESP32 para construir un tacómetro preciso que mida las RPM de un objeto en rotación y muestre los valores medidos en un módulo de pantalla LCD de 16×2. Este tacómetro barato basado en infrarrojos es más preciso que otros tacómetros basados en láser que vienen en el rango de 50 dólares en el mercado.
El tacómetro no es más que un instrumento de medición que se utiliza para medir elementos giratorios, para determinar el número de vueltas que hace en su propio eje en cierta cantidad de tiempo, que depende de su velocidad.
La unidad de medida del tacómetro son las revoluciones por minuto (RPM), ya que hay que entender que revoluciones significa vueltas, entonces sería el número de vueltas que da el elemento, por cada minuto.
La palabra tacómetro tiene un origen en el vocabulario griego, el prefijo «Tacko» significa velocidad o alta velocidad y por su parte, el sufijo «Metron» se traduce como medida. Por ello, afirmo que el tacómetro es un instrumento que mide la velocidad.
Tacómetro arduino efecto hall
En ingeniería, un tacómetro es una herramienta útil para calcular el movimiento de rotación de una pieza. Los tacómetros leen las revoluciones por minuto (RPM), que indican al usuario la frecuencia con la que una pieza giratoria completa un giro completo. Las lecturas de RPM se utilizan en los campos de la automoción, la industria aeroespacial y la fabricación [fuente]. Los tacómetros son importantes para determinar las relaciones entre el consumo de combustible y la velocidad del motor, la seguridad de las piezas en movimiento e incluso los indicadores de la velocidad del viento. Algunos tacómetros se basan en el láser, pero pueden depender del material y del color e incluso ser inexactos en condiciones de iluminación específicas. En este experimento y tutorial, demostraré cómo construir un tacómetro de efecto Hall barato y fiable que fija un imán de neodimio al eje giratorio de un ventilador de corriente continua. La velocidad de los ventiladores es importante porque son proporcionales a la cantidad de refrigeración suministrada a un sistema, y sin una representación precisa de la velocidad del ventilador – los sistemas de refrigeración pueden funcionar mal, lo que resulta en grandes pérdidas de equipos mecánicos e industriales.
3:54tutorial de arduino: tacómetro (contador de rpm)interlinkknightyoutube – 24 mayo 2019
Actualmente estoy intentando configurar un Arduino Uno y un sensor de efecto Hall (A3144) para medir las RPM de un motor. He probado el sensor, y lee «0» cuando detecta el imán, y «1» cuando el imán se retira. También he escrito un código que pensé que iba a funcionar, pero cuando pruebo mi programa, no aparece nada en el Monitor Serial. Si alguien tiene alguna idea de cómo puedo cambiar mi código para que funcione, ¡agradecería mucho algún consejo!
Aquí está una recreación de su código, no me odie si no funciona el primer intento, acabo de confirmar que se compila y no se depura. Tengo una configuración muy similar que está trabajando como una unidad de control del motor (ECU) de operación en un Teensy 4.0, por lo que la obtención de RPM utilizando un método similar está demostrado que funciona.
El problema está en la variable «hall_thresh». Desde que se empieza a contar desde el número 1 (float hall_count = 1.0;) el bucle while está esperando 99 veces (99 veces de poner el imán cerca del sensor y alejarse) entonces lo comparará con «hall_thresh».
Sismómetro arduino…
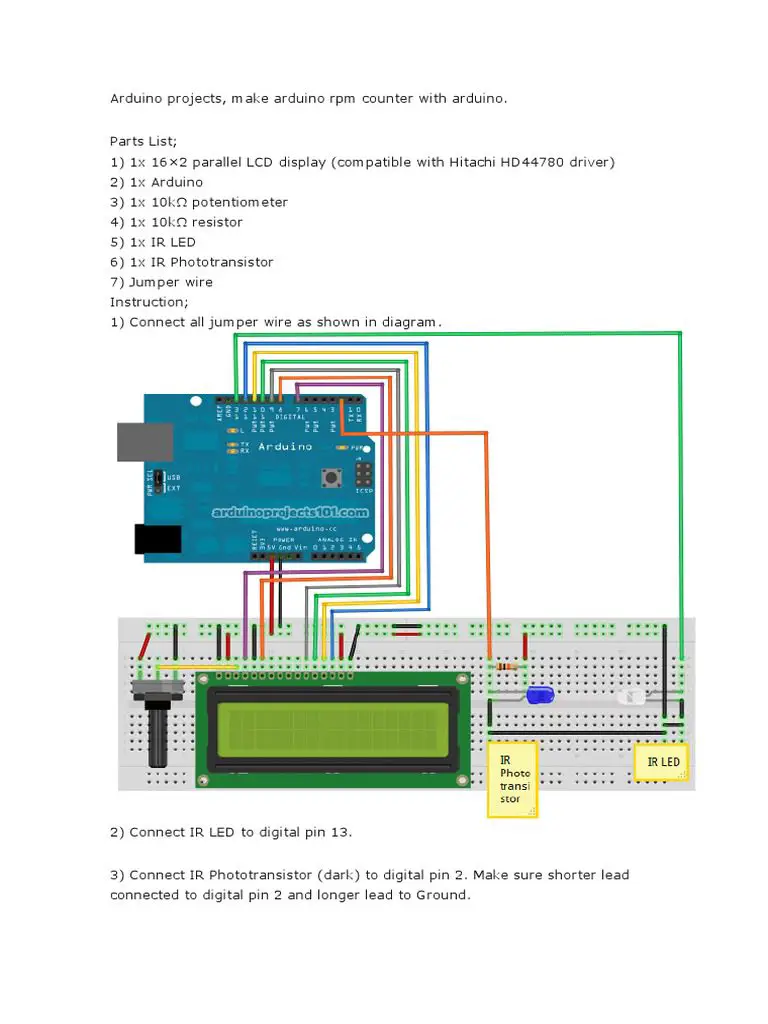
El tacómetro es un dispositivo utilizado para medir el número de revoluciones de un objeto en un intervalo de tiempo determinado. Normalmente se expresa en revoluciones por minuto o RPM. Los tacómetros más antiguos eran puramente mecánicos, en los que las revoluciones se transferían al tacómetro a través de un acoplamiento mecánico (cable o eje), las rpm se determinaban mediante un mecanismo de engranajes y se mostraban en un dial. Con la llegada de la electrónica moderna, los tacómetros han cambiado mucho. Este artículo trata de un tacómetro digital sin contacto utilizando arduino. La velocidad del motor también se puede controlar utilizando el mismo circuito. Las RPM y el resto de la información se muestran en una pantalla LCD de 16×2. El diagrama del circuito del tacómetro digital usando arduino se muestra a continuación.
Un fototransistor IR y un LED IR forman el sensor. El fototransistor IR es un tipo de fototransistor que responde únicamente a las ondas infrarrojas. El uso del fototransistor IR evita otras interferencias de luz del entorno. El fototransistor y el diodo IR están alineados uno al lado del otro. La resistencia R2 limita la corriente a través del diodo IR. Se pega una tira reflectante en el objeto giratorio (eje, disco o ventilador) en línea con el sensor. He utilizado un ventilador de 9V/100mA. La distancia entre el sensor y la tira reflectante debe ser inferior a 1 cm. Cuando la tira reflectante pasa por delante del sensor, las ondas IR se reflejan hacia el fototransistor. El fototransistor conduce más en este momento y como resultado el voltaje a través de R3 (resistencia de 68K) se dispara en este momento. El resultado será una forma de onda como la que se muestra a continuación en el emisor del fototransistor. Las RPM se pueden determinar contando el número de disparos hacia arriba en un intervalo de tiempo determinado.