Motor a pasos arduino labview
labview control de motores paso a paso vi
Ese es el punto en el que estás mezclando las cosas. Alterar la frecuencia no altera el ancho de una señal. El ancho también se llama el ciclo de trabajo y la alteración de este puede ser útil en el control se llama PWM:-
Si Mike, no tiene un sistema operativo como tal, la unidad de National Instruments que utilizo es un sistema operativo en tiempo real que sólo ejecuta las secciones de labview que necesito para recoger datos y no es un ordenador como tal. Se llama unidad compacta de Río.
Todo el hardware se encuentra en una caja y, a continuación, utilizando un router puedo ver lo que está sucediendo con mis sensores, lo hago mediante la creación de un HMI virtual en mi PC, la unidad de Labview entonces publica sus datos en el router y se vincula a mi HMI en la pantalla
Como quieres 5 vueltas, es un servo de engranajes o un motor paso a paso. El problema con un motor paso a paso es que no se sabe dónde está posicionado inicialmente, así que tienes que moverlo hasta tus 5 vueltas y controlar cuando llega a la posición correcta con un interruptor o alguna otra forma de sensor. Después de eso no hay problema.
12:09cómo programar el arduino con labview tutorialallabouteeyoutube – 13 nov 2012
En mi proyecto para girar el disco del filtro estoy utilizando un motor paso a paso, este motor tendrá una posición inicial bien definida mediante el uso de sensor de efecto hall. Quiero que el eje del motor gire 60 grados cuando reciba la orden del LabView(VISA).
Gracias por la respuesta. No necesito 60 grados exactos con un pequeño error está bien. Estoy utilizando un sensor de efecto Hall para obtener la posición de inicio. Después de alcanzar la posición de inicio el motor tiene que girar 60 grados cada vez que doy el comando de LabVIEW.
Gracias por la respuesta. El código para mover el motor a la posición HOME me parece bien. Cualquier cosa que sugieras para contar el número de comandos y los grados en que se mueve el motor trataré de incorporarlo en mi código final.
labview control de motor pwm
Hola, yo también tenía la misma configuración pero no funcionaba. Entonces cambié los pines de paso y dirección para que el pin de paso esté conectado al pin digital 2 del arduino y el pin de dirección al pin digital 3 del arduino. Entonces funcionó bien. Intenta eso.
Parece que estás usando LIFA para generar pulsos para conducir un motor paso a paso. El LIFA es demasiado lento para accionar un motor paso a paso. Deberías usar Aduino para generar los pulsos y sólo usar Laview para decirle a Aduino en qué dirección moverse y cuántos pasos dar. Así es como el paso VI que viene con LIFA works.Here es un ejemplo para un motor paso a paso de 5 voltios de 4 fases de 5 hilos y un bard conductor UNL2003 que le mostrará cómo escribir el código para Arduino. hrh1818
Hola a todos,Me doy cuenta de que el número máximo de cuentas en este programa se limita a un entero de 16 bits, es decir, (2^16/2)-1 (debido a las dos direcciones). Esto es un problema para mí, ya que he modificado este programa para poder mover el motor un número determinado de pulsos, pero mi necesidad es mayor que este límite. Intenté cambiar la representación a un entero de 32 bits en el VI y en los subVIs de LIFA, pero esto hizo que el motor no girara en absoluto.
labview linx motor paso a paso
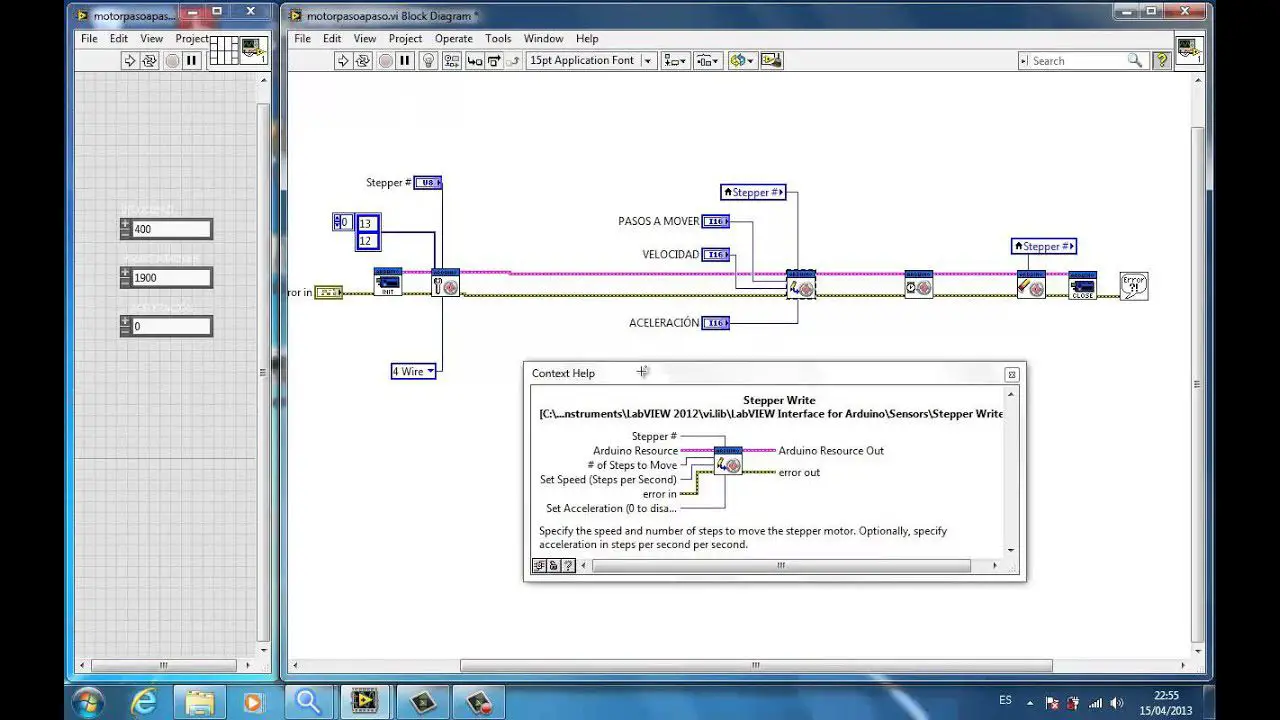
Hola a todos, me enfrento a un pequeño problema con el código de Labview. Tengo labview+arduino controlado motor paso a paso que funciona perfectamente bien para un solo paso como se da en el ejemplo de motor paso a paso. Quiero recoger 4 muestras después de un cierto período de tiempo (por ejemplo, en mi caso después de cada 10 segundos. motor debe dar un paso). He escrito un código pero de alguna manera no funciona correctamente ya que en la 4ª posición el motor empieza a girar en lugar de dar un paso mientras que en el resto de las 3 posiciones no pasa nada. Adjunto el VI de este sistema. Agradezco mucho la ayuda en este sentido. Gracias de antemano.
Bueno, lo primero es lo primero: ¿El motor paso a paso funciona normalmente (cuando sólo le dices que haga pasos)? Si es así, entonces podemos seguir adelante. El hecho de que tengas dos bucles independientes que dependen el uno del otro (una especie de oxímoron lol). Esto generalmente causará una condición de carrera que puede producir resultados inesperados. Por lo poco que has explicado sobre tu contexto, supongo que aquí se debería utilizar una máquina de estados simple. Si pudiera proporcionarnos más detalles de lo que está tratando de hacer, eso nos ayudaría a guiarlo en la dirección correcta.