Pid seguidor de linea
Documento de investigación sobre el robot seguidor de líneas
Un robot seguidor de líneas es un robot móvil autónomo que puede seguir una trayectoria. El camino puede ser un pah blanco sobre una superficie negra o un camino negro sobre una superficie blanca. Los robots seguidores de líneas suelen ser robots de entretenimiento para aficionados. Sin embargo, pueden mejorarse y utilizarse en la industria para transportar algunas cargas en una trayectoria definida o en mercados y cafeterías con fines similares.
Las unidades de entrada consisten en sensores que detectan la trayectoria blanca sobre la superficie negra o la trayectoria negra sobre la superficie blanca. El sensor IR de línea/objeto QRD1114 y el sensor óptico de reflexión CNY70 son los sensores más utilizados para los robots seguidores de líneas.
El IR emitido de CNY70 se refleja en la superficie de vuelta a la parte del fototransistor y afecta a la base del fototransistor. El color blanco o negro de la superficie de reflexión IR provoca diferentes señales analógicas en la salida del CNY70. Para convertir las señales analógicas de salida del CNY70 en señales digitales para transportarlas al microprocesador, se puede utilizar el Schmitt Triger 74HC14. Cuando el sensor CNY70 detecta blanco, la señal analógica es de 5 V y el 74HC14 la convierte en 1 lógico. Cuando el sensor CNY70 detecta negro, la señal analógica es de 0 V y el 74HC14 la convierte en 0 lógico.
Cómo funciona un seguidor de línea
Un robot seguidor de líneas, como su nombre indica, es un vehículo guiado automáticamente que sigue una línea visual incrustada en el suelo o el techo. Normalmente, la línea visual es la trayectoria que sigue el robot seguidor de líneas y será una línea negra sobre una superficie blanca, pero también es posible el camino inverso (línea blanca sobre una superficie negra). Algunos robots seguidores de líneas avanzados utilizan un campo magnético invisible como trayectoria.
Los grandes robots seguidores de líneas suelen utilizarse en las industrias para ayudar al proceso de producción automatizado. También se utilizan en aplicaciones militares, en la asistencia a personas, en servicios de entrega, etc.
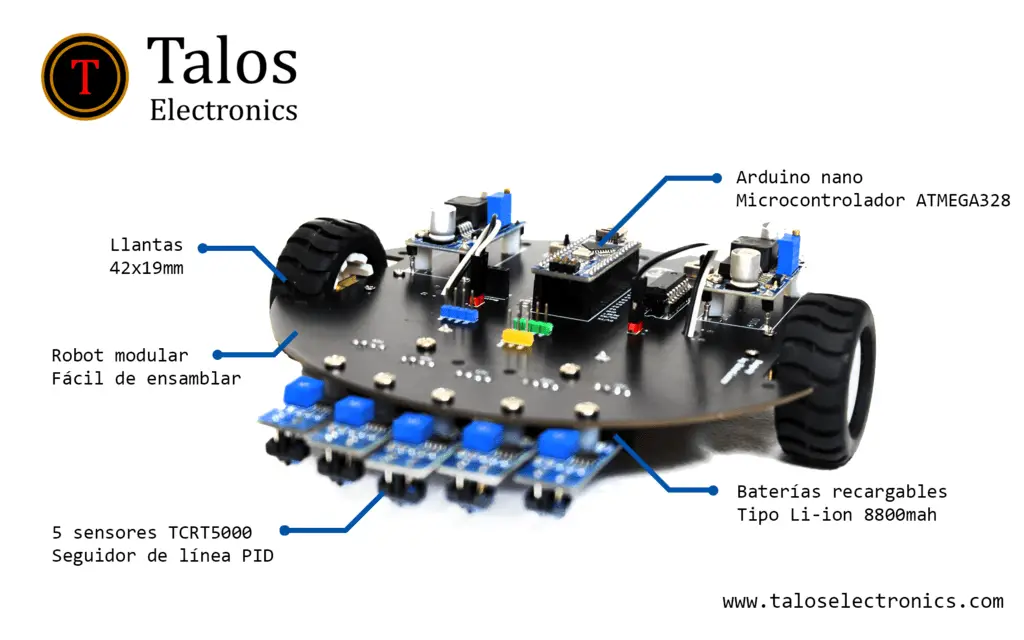
El robot seguidor de línea es uno de los primeros robots con los que los principiantes y los estudiantes tendrían su primera experiencia robótica. En este proyecto, hemos diseñado un simple Robot Seguidor de Línea utilizando Arduino y algunos otros componentes.
Controlador (Arduino UNO): Arduino UNO es el controlador principal del proyecto. Los datos de los sensores (sensores de infrarrojos) se dará a Arduino y le da las señales correspondientes al conductor del motor IC.
Código avanzado del robot seguidor de líneas en arduino
El robot seguidor de líneas es un robot muy simple que sigue una línea, ya sea una línea negra o una línea blanca. Este tipo de robots son muy sencillos de construir y suelen ser la primera opción para los principiantes que se inician en la robótica. Básicamente, hay dos tipos de robots seguidores de líneas: uno es un seguidor de líneas negro que sigue la línea negra y el segundo es un seguidor de líneas blanco que sigue la línea blanca. El seguidor de líneas detecta la línea y la sigue. Aunque la idea parece sencilla, con un poco más de desarrollo, los robots similares a éste se utilizan prácticamente en muchas aplicaciones, como los robots de gestión de fábricas o los robots de almacén.
El concepto de funcionamiento del seguidor de líneas está relacionado con la luz. Aquí utilizamos el comportamiento de la luz en las superficies blancas y negras. Cuando la luz incide sobre una superficie blanca se refleja casi totalmente y en el caso de una superficie negra la luz se absorbe completamente. Este comportamiento de la luz se utiliza en la construcción de un robot seguidor de líneas.
En este robot seguidor de líneas basado en Arduino, hemos utilizado transmisores IR y receptores IR también llamados fotodiodos. Se utilizan para enviar y recibir la luz. El IR transmite luces infrarrojas. Cuando los rayos infrarrojos caen sobre la superficie blanca, se reflejan y son captados por los fotodiodos que generan algunos cambios de voltaje. Cuando la luz IR cae en una superficie negra, la luz es absorbida por la superficie negra y no se reflejan los rayos de vuelta, por lo tanto el fotodiodo no recibe ninguna luz o rayos. Aquí en este robot Arduino seguidor de línea cuando el sensor detecta la superficie blanca entonces Arduino obtiene 1 como entrada y cuando detecta la línea negra Arduino obtiene 0 como entrada.
Robot seguidor de línea pdf
const int right_irsensor = 8;/*Dice que el sensor IR derecho está conectado al pin 8. const es para decir que siempre estará conectado al pin 8. int es para entero. 8 es un entero, así que usamos int. Después de int, se declara una variable o una constante. En este caso, es una constante. Una variable puede cambiar de valor mientras que una constante no puede hacerlo.*/
pinMode(x, OUTPUT);/*Declarar x como salida. Para ello se utiliza la función pinMode(). En resumen, los pines 2 a 5 son salidas. Esto tiene sentido ya que los motores son dispositivos de control, a los que se les dan órdenes.*/
int right_sensor = digitalRead(right_irsensor);/*declarar una variable llamada right_sensor para tomar la lectura del sensor IR derecho. Estamos utilizando digitalRead() ya que es sólo una superficie blanca y negra. Se leerá LOW para el negro y HIGH para el blanco.*/