Pin pwm arduino uno
Arduino pwm
Los pines 3, 5, 6 y 9 son PWM por lo que puedo alalogWrite() a ellos y controlar la velocidad de los motores. El código sube bien pero aunque ambos motores se mueven hacia delante normalmente el motor 1 (en los pines 3, 5) no se mueve hacia atrás. Lo extraño es que si uso digitalWrite (el código comentado en las dos funciones) en su lugar todo funciona normalmente pero los motores se mueven a toda velocidad por lo que no es utilizable para mi proyecto. He probado todos los pines en otros proyectos y todo funcionaba bien así que sé que mi placa no está defectuosa.
Prueba con pines diferentes a los 5 y 6, porque esos generadores PWM comparten el temporizador con delay(), lo que yo interpretaría como: Usas analogWrite() para configurar el temporizador para que se dispare cada n microsegundos para alternar tu señal PWM — y luego llamas a delay(1000), que configura ese mismo temporizador para que se dispare en un segundo para continuar el programa.
Arduino uno pwm
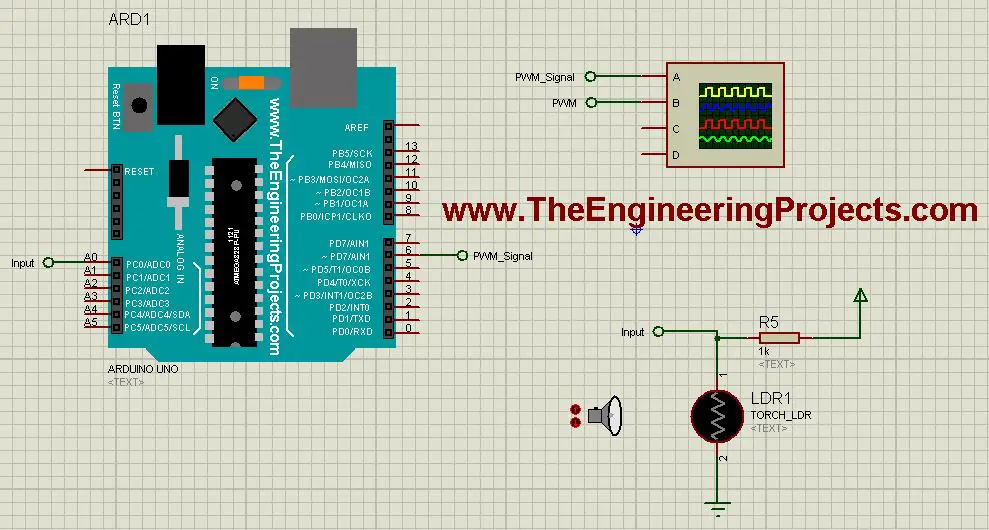
Escribe un valor analógico (onda PWM) en un pin. Se puede utilizar para encender un LED con diferentes brillos o para accionar un motor a varias velocidades. Después de una llamada a analogWrite(), el pin generará una onda rectangular constante del ciclo de trabajo especificado hasta la siguiente llamada a analogWrite() (o una llamada a digitalRead() o digitalWrite()) en el mismo pin.
Las salidas PWM generadas en los pines 5 y 6 tendrán ciclos de trabajo más altos de lo esperado. Esto se debe a las interacciones con las funciones millis() y delay(), que comparten el mismo temporizador interno utilizado para generar esas salidas PWM. Esto se notará sobre todo en los ajustes de ciclos de trabajo bajos (por ejemplo, 0 – 10) y puede resultar en un valor de 0 que no apague completamente la salida en los pines 5 y 6.
Ejemplo de pwm en arduino
La modulación de ancho de pulso, o PWM, es una técnica para obtener resultados analógicos con medios digitales. El control digital se utiliza para crear una onda cuadrada, una señal que se enciende y se apaga. Este patrón de encendido y apagado puede simular tensiones entre el encendido total (5 voltios) y el apagado (0 voltios) cambiando la porción de tiempo que la señal pasa encendida frente al tiempo que la señal pasa apagada. La duración del «tiempo de encendido» se denomina ancho de pulso. Para obtener valores analógicos variables, se cambia o modula esa anchura de pulso. Si repites este patrón de encendido y apagado lo suficientemente rápido, el resultado es como si la señal fuera un voltaje constante entre 0 y 5v que controla la velocidad del motor.
Generalmente, la frecuencia PWM de Arduino es de unos 500Hz. En Arduino IDE, utilizamos el concepto PWM a través de la función analogWrite(). Le damos un valor que oscila en una escala de 0 – 255, de manera que analogWrite(255) solicita un ciclo de trabajo del 100% (siempre encendido), y analogWrite(127) es un ciclo de trabajo del 50% (encendido la mitad del tiempo), por ejemplo.
El bloque Set PWM pin () output as () es un bloque de extensión de evive. Este bloque establece la salida PWM en los pines PWM de evive. El usuario puede seleccionar la salida en un rango de 0 a 255. Si la salida PWM es 128, entonces la mitad del tiempo la salida será Alta y para el resto, la salida será Baja.
Pines pwm del arduino nano
A continuación, puede utilizar el software FLIP de Atmel (Windows) o el programador DFU (Mac OS X y Linux) para cargar un nuevo firmware. O puedes usar la cabecera ISP con un programador externo (sobrescribiendo el bootloader DFU). Consulta este tutorial aportado por un usuario para obtener más información.
La Uno se diferencia de todas las placas anteriores en que no utiliza el chip controlador USB-a-serial de FTDI. En su lugar, cuenta con el Atmega16U2 (Atmega8U2 hasta la versión R2) programado como un convertidor USB-a-serial.
La alimentación externa (no USB) puede provenir de un adaptador AC-to-DC (wall-wart) o de una batería. El adaptador puede conectarse enchufando una clavija de 2,1 mm con polo positivo en el conector de alimentación de la placa. Los cables de una batería se pueden insertar en los cabezales de las clavijas GND y Vin del conector POWER.
La placa puede funcionar con una alimentación externa de 6 a 20 voltios. Sin embargo, si se alimenta con menos de 7V, el pin de 5V puede suministrar menos de cinco voltios y la placa puede volverse inestable. Si se utiliza más de 12V, el regulador de voltaje puede sobrecalentarse y dañar la placa. El rango recomendado es de 7 a 12 voltios.