Programacion de robot sumo en arduino
5:43 tutorial de codificación del sumobot ev3aaron maureryoutube – 13 jun 2017
Añadir sensores al Zumo le permite sentir y reaccionar a su entorno. En una competición de sumo en la que dos robots intentan empujarse mutuamente fuera de un anillo circular, es importante que un robot sea capaz de detectar el borde del anillo para evitar pasar por encima del mismo. Dado que los anillos de sumo estándar de los robots son de color negro con un borde blanco alrededor del borde, los sensores de reflectancia infrarroja como nuestros sensores QTR son excelentes para este propósito. La matriz de sensores de reflectancia de Zumo monta convenientemente seis de estos sensores en un módulo diseñado para conectarse directamente a la cabecera de expansión frontal del Zumo Shield (nota: la versión premontada del robot Zumo se envía con esta matriz de sensores de reflectancia ya instalada).
Este ejemplo demuestra cómo programar un Zumo controlado por Arduino y equipado con una matriz de sensores de reflectancia para conducir alrededor y permanecer dentro de un anillo de sumo. Tenga en cuenta que sólo utiliza los dos sensores más externos de la matriz, que son suficientes para la detección de los bordes. Con la biblioteca del Zumo Shield Arduino instalada, el archivo de bocetos se puede abrir en Arduino seleccionando Archivo > Ejemplos > ZumoShield > BorderDetect.
sensores del robot sumo
Robocon Magazine es una revista de robótica en general, y es muy reconocida como medio que informa sobre diversos concursos de robótica en Japón. Pero como es una revista impresa, naturalmente tiene límites. En este post, revelaremos algunos de los detalles que no se cubren en la edición impresa.
El concurso All Japan Robot Sumo, patrocinado por Fuji Software, es la mejor competición pública de Japón y del mundo. Cada año, participan aproximadamente 1.000 equipos y sólo los 64 equipos que ganan en las 9 regiones consiguen entrar en el ring en la competición nacional de robots de sumo que se celebra en el Salón Nacional de Sumo. El más alto honor de «Yokozuna» se otorga al robot que gana aquí.
El anillo del robot de sumo es una lámina metálica circular de poco más de 1,5 metros de diámetro. En lugar de los límites tradicionales del ring de sumo, se pinta una línea blanca de 5 cm de ancho en la chapa. Si se cae fuera de ese límite, se pierde.
En el sumo robótico, ésta es la única forma de ganar. En otras palabras, o bien tu oponente te empuja o te caes debido a tu propio exceso de impulso, en cualquier caso esto significa una victoria para tu oponente. Hay tres rondas, así que dos caídas terminan en una pérdida.
wikipedia
Selección de componentesComo somos libres de utilizar los recursos de la empresa, intentaremos utilizar lo que tenemos en nuestra tienda, por lo que algunos de los componentes pueden no ser la mejor opción. Usted debe explorar más lo que está disponible en el mercado para dar a su robot el mejor rendimiento si están dentro de su presupuesto.Hay 5 componentes principales en un Robot Sumo.
1. Elige el controlador con el que estés familiarizado. Si usted no tiene ninguna preferencia, yo sugeriría fuertemente que usted vaya para Arduino simplemente porque estamos utilizando la placa Arduino y se puede utilizar nuestro código de ejemplo para start.Whether usted está usando Arduino Uno, Mega o Nano, no se olvide que usted todavía necesita un controlador de motor de 2 canales para conducir sus motores de alta potencia y una placa de expansión para conectar todos sus sensores. Puedes construir tu propia placa de expansión y conectar todos los pines a tu Arduino con puentes o conseguir una placa integrada de nuestra compañía donde puedes conectar todas las partes electrónicas en una sola placa para eliminar la molestia del cableado.Controlador principal + Drivers de motor + Breadboard
robot-sumo
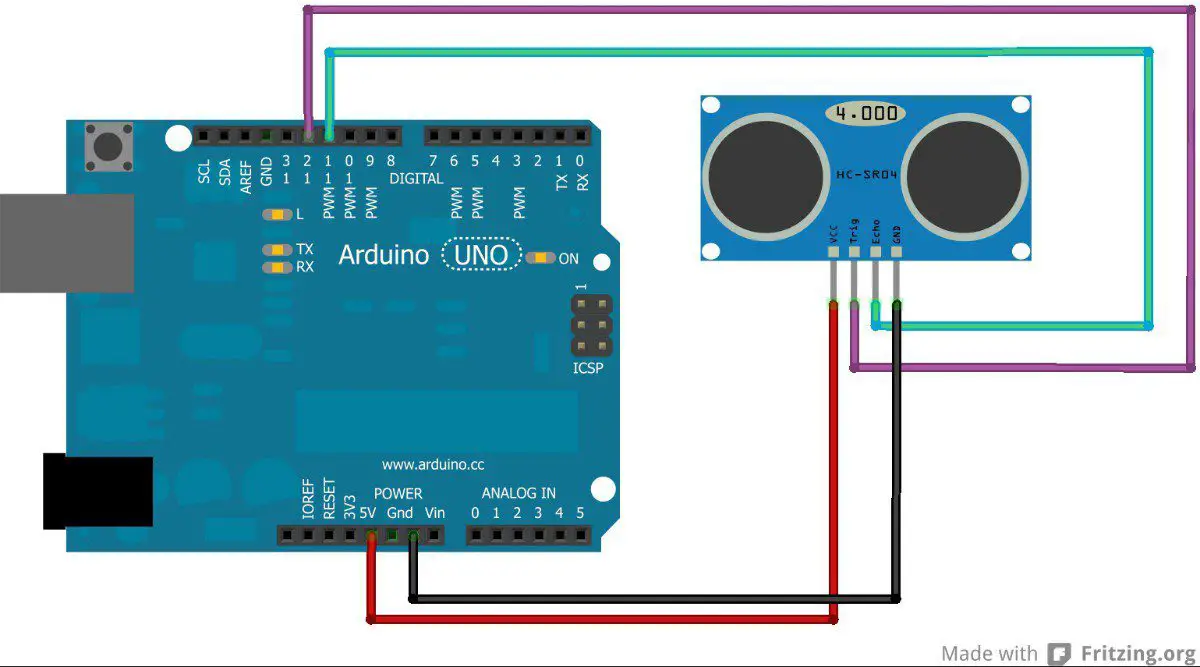
¿Has visto alguna vez un combate de sumo? ¿Y qué hay de los robots que hacen lucha de sumo? Sí, existe el robot sumo, que también se considera un deporte. Se trata de un deporte en el que dos robots intentan empujarse mutuamente fuera de un círculo, típicamente igual que el combate de sumo real. Para hacerlo más desafiante, los competidores tienen que programar los robots de tal manera que encuentren a su oponente (normalmente se consigue con sensores infrarrojos o ultrasónicos) y lo empujen fuera de la arena plana. El robot también debe evitar salir de la arena, normalmente mediante un sensor que detecta el borde.
Todos estos consejos y trucos pueden realizarse mediante la programación de robots de sumo. Puedes crear potentes e innovadores robots de sumo programándolos a través de Arduino. Las estrategias de programación para el combate robótico son posibles mediante el uso de sumo robot para Arduino – Esto le permitirá programar y descargar el código C en su kit de sumo inteligente Rokit que es otro componente que usted necesita en la construcción de su robot de sumo. El kit de sumo inteligente Rokit se puede comprar en Robolink. Configurando Arduino a Rokit Smart, podrás crear estrategias de programación listas para el combate robótico. La configuración del controlador USB de smart inventor también es un requisito para construir este super robot. Sólo con conectar el controlador USB de smart inventor a tu ordenador y a la placa base de Rokit Smart, ¡ya está todo listo!