Puente h l293d diagrama
Driver de motor de puente h
En este blog, voy a explicar cómo utilizar el popular driver de motor L293D (a menudo mal escrito como L239D) junto con un Arduino para controlar la dirección y la velocidad de los motores de corriente continua. También explicaré los circuitos de puente H, en los que se basan los controladores de motor como el L293D. Esto será muy útil en muchos proyectos de robótica y electrónica, así que ¡comencemos!
Un motor de corriente continua (DC) es un motor que gira cuando se aplica un voltaje en sus terminales. La velocidad del motor es proporcional a la tensión y la dirección depende de la polaridad (dirección de la corriente).
En pocas palabras, un motor de corriente continua gira cuando se conecta a una fuente de alimentación de corriente continua (como una batería). Cuanto mayor sea la tensión, más rápido girará. Si la fuente de alimentación se conecta al revés, el motor girará en la dirección opuesta, pero con la misma velocidad que antes. Así es exactamente como se controla la velocidad y la dirección de un motor de corriente continua.
Si bien el control de la velocidad puede realizarse con bastante facilidad mediante un microcontrolador (utilizando la modulación por ancho de pulso), los motores de CC suelen necesitar más corriente de la que pueden proporcionar la mayoría de los microcontroladores. Aquí es donde entran en juego los H-Bridges. Los H-Bridges actúan como circuitos intermedios que permiten la amplificación bidireccional de la corriente, permitiendo al microcontrolador conducir el motor en ambas direcciones sin dañarse. Algunos H-Bridges (como el L293D) también proporcionan pines adicionales para un control de velocidad más conveniente.
L293d arduino
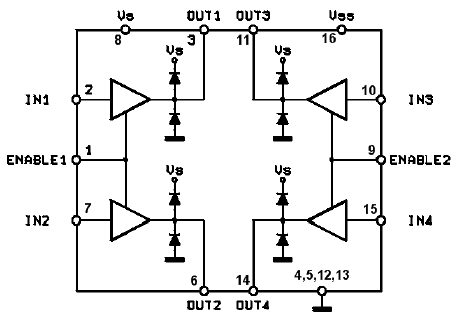
En este artículo queremos profundizar en el L293D. El L293D es el circuito integrado más utilizado para accionar motores y es necesario conocer su teoría, diagrama, simulación y pinout. Aquí discutiremos todos estos temas.
Los motores utilizados en los robots académicos normalmente funcionan a 5, 6, 9, 12 o 24 voltios. Dependiendo del modelo, el método de fabricación, el precio, etc., su corriente es de unos 100 mA a 5A. Los motores se pueden utilizar de varias maneras. Un método es conectarlo directamente a una batería, entonces gira a su máxima velocidad en una dirección determinada, pero en la práctica, necesitamos controlar los motores (encendido y apagado, control de velocidad, control de dirección y control de posición).
Por lo tanto, debemos controlar los motores mediante controladores (circuitos lógicos o microcontroladores o PCs u ordenadores). Pero como sabes, la salida de los microcontroladores es de 5V y 200mA y no pueden hacer girar el motor. Así que necesitamos circuitos intermedios para conectar el controlador con el motor, llamados drivers.
El L293D es uno de los drivers más populares del mercado. Hay varias razones que hacen que el L293D sea el driver preferido por los usuarios, como por ejemplo, su precio barato (comparado con otros drivers), su forma y tamaño adecuados, su fácil control, la no necesidad de circuitos de protección y diodos, la no necesidad de disipadores de calor y la buena resistencia a las variaciones de temperatura y alta velocidad. Este CI puede configurar motores con una tensión entre 5V y 36V y una corriente de hasta 600 mA. Sin embargo, puede soportar una corriente de hasta 1200 mA en 100 microsegundos y no repetitiva. La frecuencia de este CI es de 5 kHz. Si su motor coincide con estas especificaciones, no dude en utilizar el L293D.
Controlador de motor l293d
Un puente H no es más que un circuito electrónico. Utilizando un circuito de este tipo, se puede suministrar corriente en dos direcciones. Así es. El L293D es un puente en H con dos salidas posibles. Es decir, puedes conectarle dos cosas… y puedes controlar la dirección del flujo de corriente en ambas.
Ahora, si cierras los interruptores S1 y S4, la corriente fluye a través del motor de izquierda a derecha. Si cierras S3 y S2, la corriente fluye de derecha a izquierda. En estas dos condiciones, el sentido de giro es diferente.
Esto es exactamente lo que se necesita en la mayoría de los proyectos de robótica que utilizan ruedas de accionamiento diferencial. Pero tener interruptores físicos sería muy inconveniente. Necesitarías más motores para cerrar y abrir los interruptores. Y para controlar esos motores necesitarías aún más interruptores. Ah, bueno. Probablemente se entienda la idea.
Así que los investigadores crearon un interruptor controlado electrónicamente: un transistor. Y la gente utilizó esos transistores e hizo circuitos similares al que se muestra arriba. La única diferencia era que en lugar de interruptores físicos, tenían interruptores electrónicos.
Puente en h l293d
Un puente H es un circuito electrónico que conmuta la polaridad de una tensión aplicada a una carga. Estos circuitos se utilizan a menudo en robótica y otras aplicaciones para permitir que los motores de CC funcionen hacia delante o hacia atrás[1].
El término puente H se deriva de la representación gráfica típica de un circuito de este tipo. Un puente H se construye con cuatro interruptores (de estado sólido o mecánicos). Cuando los interruptores S1 y S4 (según la primera figura) están cerrados (y S2 y S3 abiertos) se aplica una tensión positiva a través del motor. Al abrir los interruptores S1 y S4 y cerrar los interruptores S2 y S3, esta tensión se invierte, permitiendo el funcionamiento inverso del motor.
Siguiendo la nomenclatura anterior, los interruptores S1 y S2 nunca deben estar cerrados al mismo tiempo, ya que esto provocaría un cortocircuito en la fuente de tensión de entrada. Lo mismo ocurre con los interruptores S3 y S4. Esta condición se conoce como «shoot-through».
La disposición del puente H se utiliza generalmente para invertir la polaridad/dirección del motor, pero también se puede utilizar para «frenar» el motor, donde el motor se detiene repentinamente, ya que los terminales del motor están en cortocircuito, o para dejar que el motor «funcione libremente» hasta una parada, ya que el motor está efectivamente desconectado del circuito. La siguiente tabla resume el funcionamiento, con S1-S4 correspondiente al diagrama anterior.