Puente h l293d proteus
Motor proteus
Explicación del código: El sketch comienza incluyendo la librería AFMotor.h. La segunda línea AF_DCMotor(motorPort#); crea un objeto de la librería. Aquí tienes que declarar el número de puerto del motor al que está conectado. Para el puerto M1 escriba 1, para M2 escriba 2 y así sucesivamente. Por ejemplo, el siguiente fragmento de código crea dos objetos AFmotor.AF_DCMotor motor1(1);
Explicación del código: El sketch comienza incluyendo la librería AFMotor.h. La segunda línea AF_Stepper motor(48, 2); crea un objeto de la librería. En la sección de configuración y bucle del código simplemente llamamos a las dos funciones siguientes para controlar la velocidad y la dirección de giro de un motor.Driving Servo Motors with L293D ShieldDriving the servos with L293D shield is as easy as pie. El escudo del motor en realidad rompe los pines de salida PWM de 16 bits de Arduino # 9 y # 10 al borde del escudo con dos cabezales de 3 pines.La energía para los servos viene del regulador de 5V a bordo de Arduino, por lo que no tiene que conectar nada a la terminal EXT_PWR.Cableado de Servo Motor al Escudo de Motor L293D y ArduinoComo estamos usando los pines PWM a bordo, el boceto utiliza la biblioteca de Servo incorporada de IDE.#include <Servo.h>
Microcontrolador l293d
Hola a todos, espero que os vaya muy bien. Hoy voy a compartir una nueva librería de controladores de motor L298 para Proteus. Nunca ha sido diseñada antes y estamos orgullosos de presentarla por primera vez. Espero que os guste. También deberíais echar un vistazo al Control de Velocidad de Motores DC usando L298 en el que he usado el mismo módulo en el diseño de hardware. Pero hoy vamos a verlo en acción en Proteus Simulation y es bastante emocionante para mí también. Si usted no sabe mucho acerca de L298, entonces usted también debe echar un vistazo a la Introducción a L298, en el que he discutido los fundamentos del módulo L298, será muy informativo para usted. Si usted tiene algún problema con respecto a este L298 Motor Driver Library para Proteus, entonces usted puede preguntar en los comentarios y voy a hacer todo lo posible para resolver sus problemas. Así que, vamos a empezar con L298 Motor Driver Library for Proteus:L298 Motor Driver Library for Proteus
Esto es todo sobre el L298 Motor Driver en Proteus y espero que no tengas ningún problema en simularlo en Proteus. Si usted todavía tiene algún problema, entonces como k en los comentarios y le ayudará a cabo y dar sus sugerencias también. También voy a ejecutar el motor paso a paso con este controlador de motor L298.
Pwm proteus
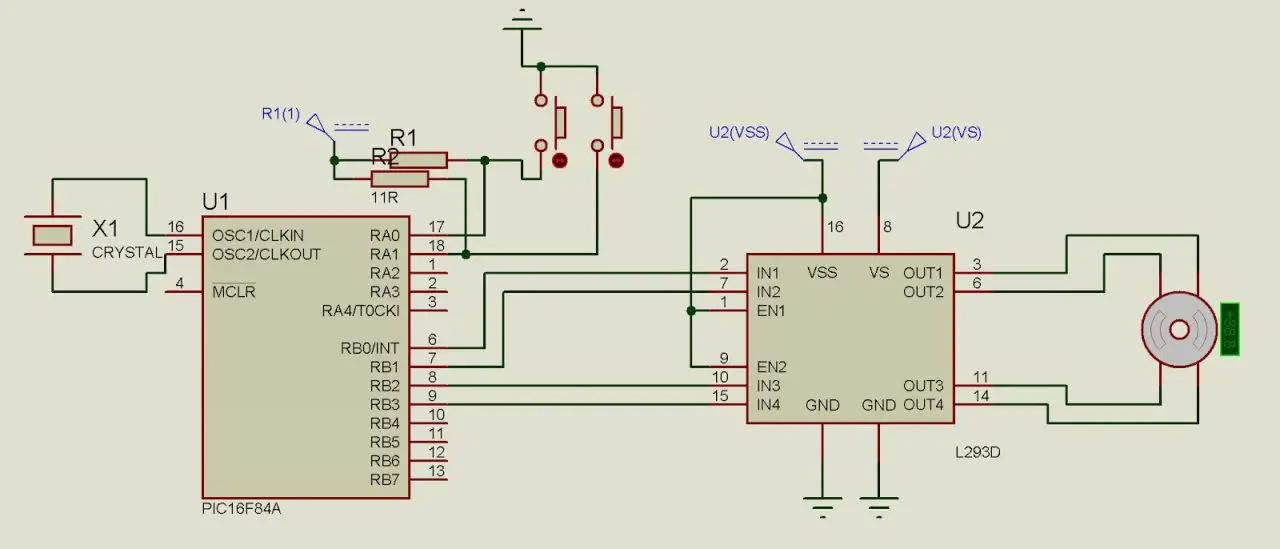
Hola a todos, espero que os vaya muy bien. En el tutorial de hoy, voy a dar una visión general de L293D, que se utiliza en proyectos de robótica mucho. Es básicamente un chip integrado con un controlador de motor dual. Por lo tanto, puedes controlar fácilmente dos motores de corriente continua con el L293D. Puedes controlar la dirección así como la velocidad de estos motores DC con el L293D.
Estos primeros ocho pines del L293D se utilizan para controlar un motor DC. Hay dos entradas y dos salidas. Ambas entradas deben ser conectadas con el microcontrolador, mientras que las salidas deben ser conectadas con tu motor DC. Ahora, pasemos a los siguientes ocho pines del L293D:
Estos 8 pines se utilizan para controlar el segundo motor de corriente continua. También podemos controlar un motor paso a paso con el L293D, pero sólo se puede controlar un motor paso a paso con un solo L293D IC, ya que sabemos que un motor paso a paso tiene 4 pines para controlar. Normalmente el L298 se utiliza para controlar motores con microcontroladores como Arduino Nano, Arduino Pro Mini etc.
Así que, eso fue todo sobre el L293D. Espero que hayas disfrutado del tutorial de hoy. Hacedme saber vuestros proyectos con este IC de puente H en los comentarios de abajo. Nos veremos en el próximo tutorial. ¡¡¡Hasta entonces cuídate y diviértete !!! 🙂
4:15proteus para principiantes turorial#3 – creación de un circuito de corriente alternanova technologiesyoutube – 5 feb 2017
En el circuito hay 3 pulsadores, 2 para seleccionar el sentido y el otro para parar el motor. Los 2 LEDs sirven para indicar el sentido de giro del motor, si el LED1 está ON significa que se ha elegido el sentido 1 y lo mismo para el LED 2. Si ambos LEDs están apagados significa que el motor se ha parado.
El microcontrolador PIC16F877A lee los datos analógicos del canal 0 y utiliza el valor digital para ajustar el ciclo de trabajo PWM. Si se pulsa el botón de dirección 1 el microcontrolador inicia el PWM1 (pin RC2) y detiene el PWM2 (pin RC1) y si se pulsa el botón de dirección 2 el microcontrolador detiene el PWM1 (pin RC2) e inicia el PWM2 (pin RC1), cuando se pulsa el botón de parada el microcontrolador detiene las señales PWM1 y PWM2 y el motor se detendrá.