Servo con potenciometro arduino
controlar un servo con un potenciómetro
Controlar un servomotor con un potenciómetro y ArduinoÚltima actualización: 22 de julio de 2021en Control de motores ArduinoEn este tutorial, vas a controlar el giro de un servo con un potenciómetro. A diferencia del tutorial anterior, Tutorial de Arduino: 6.1 Controlando la posición del servomotor, vamos a utilizar una entrada analógica para controlar el servomotor. Esto será útil si decides hacer algo con una plataforma de pan / tilt.
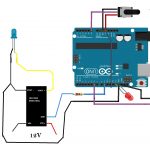
Diagrama del circuito – Conecta 5V y tierra a un lado de tu protoboard desde el Arduino. El servo tiene tres cables que salen de él. Uno es el de alimentación (rojo), otro es el de tierra (negro), y el tercero (blanco) es la línea de control que recibirá la información del Arduino. Enchufa tres cabezales macho en los extremos hembra de los cables del servo. Conecta los cabezales a tu protoboard de forma que cada pin esté en una fila diferente. Conecta 5V al cable rojo, tierra al cable negro y el cable blanco al pin 9.
Cuando un servomotor comienza a moverse, consume más corriente que si ya estuviera en movimiento. Esto causará una caída en el voltaje de tu placa. Colocando un condensador de 100uf entre la alimentación y la tierra justo al lado de los cabezales macho, puedes suavizar cualquier cambio de voltaje que pueda ocurrir. También puedes colocar un condensador a través de la alimentación y la tierra que va a tu potenciómetro. Se llaman condensadores de desacoplamiento porque reducen, o desacoplan, los cambios causados por los componentes del resto del circuito. Asegúrate de que conectas el cátodo a tierra (el lado con una franja negra) y el ánodo a la alimentación. Si pones los condensadores al revés, pueden explotar.
uso del potenciómetro en el servomotor
Descripción: Un servomotor es un dispositivo eléctrico que puede empujar o girar un objeto con gran precisión. Si desea girar un objeto en algunos ángulos o distancias específicas, entonces utiliza un servomotor. Podemos obtener un motor servo de muy alto par en un paquete pequeño y ligero. Debido a estas características, se utilizan en muchas aplicaciones como coches de juguete, helicópteros y aviones RC, robótica y máquinas.
Un servo consiste en un motor (DC o AC), un potenciómetro, un engranaje y un circuito de control. En primer lugar, utilizamos el conjunto de engranajes para reducir las RPM y aumentar el par del motor. Digamos que en la posición inicial del eje del servo motor, la posición de la perilla del potenciómetro es tal que no hay señal eléctrica generada en el puerto de salida del potenciómetro. Ahora se da una señal eléctrica a otro terminal de entrada del amplificador detector de errores. La diferencia entre estas dos señales, una procedente del potenciómetro y otra de otra fuente, se procesará en el mecanismo de retroalimentación y la salida se proporcionará en forma de señal de error. Esta señal de error actúa como la entrada para el motor y el motor comienza a girar. Ahora el eje del motor está conectado con el potenciómetro y cuando el motor gira también lo hace el potenciómetro y generará una señal. Así que cuando la posición angular del potenciómetro cambia, su señal de retroalimentación de salida cambia. Después de algún tiempo, la posición del potenciómetro llega a una posición en la que la salida del potenciómetro es igual a la señal externa proporcionada. En esta condición, no habrá señal de salida del amplificador a la entrada del motor ya que no hay diferencia entre la señal externa aplicada y la señal generada en el potenciómetro, y en esta situación el motor deja de girar.
servomotor con potenciómetro tinkercad
En este blog, voy a explicar sobre el control de tres Servomotor por tres Potenciómetro. Se puede controlar el Servomotor por el Potenciómetro. La conexión del circuito puede ser muy difícil pero se utilizará en proyectos en tiempo real.
Un Potenciómetro es informalmente un pote y es una resistencia de tres terminales con un contacto deslizante o giratorio, que forma un divisor de tensión ajustable. Si sólo tiene dos terminales, que se utilizan -un extremo y el rascador-, actúa como una resistencia variable o reóstato.
potenciómetro para servos rc
Los servos se controlan enviando un pulso eléctrico de ancho variable o modulación de ancho de pulso (PWM), a través del cable de control. Por lo tanto, puede ser controlado por los pines PWM o -cualquier pin digital. Como se muestra en el siguiente diagrama, con un ancho de pulso de 1,5ms aplicado a la línea de control, el servo se sitúa en la posición neutral -en este caso, identificada como 90º-. Cuando el ancho de pulso aumenta o disminuye, el servo se mueve hacia 180º o 0º, respectivamente.También puedes describir la posición neutral como 0º, en cuyo caso el rango angular del servo se extiende de -90º a +90º.
En otras palabras, un pulso de 1.5ms hará que el motor gire a la posición de 90º. Un pulso menor a 1.5ms lo mueve en dirección contraria a las manecillas del reloj hacia la posición de 0º, y cualquier pulso mayor a 1.5ms hará girar al servo en dirección a las manecillas del reloj hacia la posición de 180º.¡Eso es todo!
Así que, en lugar de soldar el potenciómetro a los cables del puente, también puedes usar cables para unirlos como en la imagen de abajo. Esto seguramente te ayudará a ahorrar algunos cables de puente para tus futuros proyectos.