Arduino raspberry pi serial communication
proyectos raspberry pi arduino
En primer lugar, voy a explicar rápidamente lo que es la comunicación en serie. Luego verás cómo configurar el hardware y el software, y nos sumergiremos en el código Python (Cpp para Arduino). Un ejemplo básico al principio, que conduce a una aplicación más completa utilizando una Raspberry Pi, un Arduino, y otros dispositivos electrónicos.
Este tutorial funcionará con una placa Raspberry Pi 4 (y anteriores: 3B, 3B+), y cualquier placa Arduino. Utilizaré principalmente Arduino Uno, pero daré más detalles sobre las diferencias entre las placas Arduino cuando se trata de la comunicación en serie.
Cuando se trabaja con dispositivos electrónicos, la comunicación es clave. Cada dispositivo -además de hacer bien lo que se supone que debe hacer- debe ser capaz de comunicarse claramente con otros dispositivos. Es una de las cosas más importantes que hay que trabajar para pasar de una aplicación muy básica a otras más complejas.
La comunicación en serie es simplemente una forma de transferir datos. Los datos se envían de forma secuencial, un bit cada vez (1 byte = 8 bits), al contrario que la comunicación en paralelo, en la que se envían muchos bits al mismo tiempo.
comunicación en serie de la raspberry pi 4.
La comunicación en serie (UART) es uno de los protocolos de comunicación más populares. La mayoría de los procesadores soportan esta conexión de dos hilos. También, muchos de los módulos y sensores utilizan la comunicación en serie para conectarse a otros dispositivos.La comunicación en serie requiere sólo dos cables; uno para transmitir datos y el otro para recibirlos.La tasa de transferencia de datos en este protocolo se llama la tasa de baudios. La unidad de la tasa de baudios es el bit por segundo.
Las placas Raspberry Pi tienen dos tipos de comunicaciones UART. Una se llama PL011 y la otra se llama miniUART. Las placas Raspberry Pi que tienen módulo Bluetooth/Wireless, utilizan el PL011 para la comunicación UART por defecto.
El nivel de voltaje de todos los pines de la Raspberry Pi, incluyendo los pines RX y TX, es de 3,3 voltios. Así que para conectar un dispositivo con un nivel de voltaje de 5 voltios a la Raspberry Pi, debes utilizar un convertidor de nivel de voltaje o un circuito de división de resistencia.
Sigue los siguientes pasos para iniciar la comunicación UART de la Raspberry Pi:Paso 1. Conecta el convertidor de serie a USB a la placa Raspberry Pi como se muestra en el circuito. A continuación, conecte la alimentación de la Raspberry Pi y conecte el convertidor a su PC.Paso 2. Vaya al Administrador de Dispositivos y encuentre el número de puerto que está conectado al convertidor.
raspberry pi serial communication python
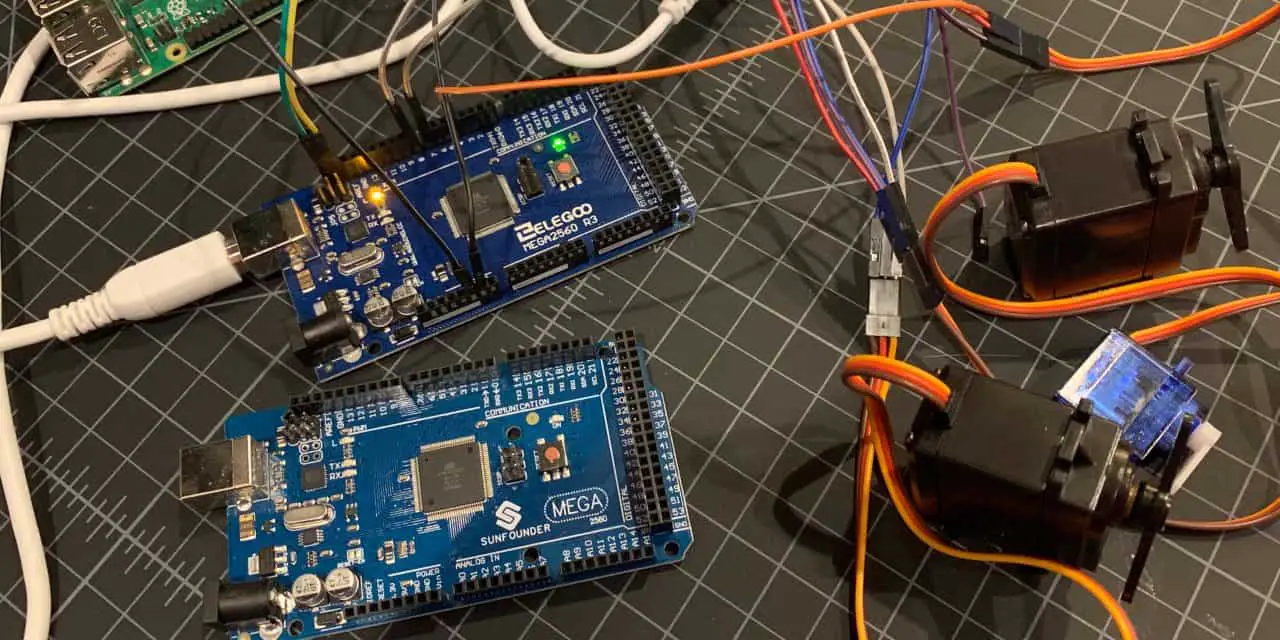
En este tutorial se aprende a enviar datos desde un Arduino a una Raspberry Pi.Para la comunicación utilizamos un cable USB. Podría ser el cable USB que se utiliza para conectar el Arduino a su PC o portátil, pero en este tutorial se conecta la Raspberry Pi en lugar del PC o portátil.
La conexión por cable es ideal para obtener una primera impresión de cómo dos sistemas diferentes como el Arduino como micro-controlador y la Raspberry Pi como ordenador de placa única (SBC) son capaces de trabajar juntos. Si también estás interesado en las diferencias entre el Arduino y la Raspberry Pi, entonces echa un vistazo a este artículo donde encontrarás una gran visión general.
Sin embargo, la conexión por cable no está en el trabajo en mi vida diaria IoT, porque yo uso el Arduino o ESP8266 basado en micro-controladores como satélites en mi casa donde en el centro es el Raspberry Pi en un rack de servidor. Debido a que no tengo cables USB en mis paredes por supuesto que uso una conexión WiFi. Si usted también prefiere una conexión inalámbrica que se encuentra aquí el tutorial.
comunicación entre arduino y raspberry pi
Ahora lo que intento hacer es enviar las referencias de velocidad y dirección a la pi y solo enviarlas de vuelta al mega. Una vez que sepa que puedo enviar las referencias hacia arriba y hacia atrás usaré la pi para la navegación. Usando python en la pi puedo enviar las referencias hacia arriba, mi problema es enviarlas de vuelta y parece ser un problema con el uso de Serial.available en el mega.
He descubierto que si uso Serial.available() > 0 en la sentencia if no lee el puerto serie. Si lo cambio a 1 para que la sentencia if sea siempre verdadera, lee los datos pero obtengo números inconsistentes, supongo que porque no está leyendo los datos correctamente, la sincronización del puerto está mal o algo así. Tengo un retraso de 0,1 segundos en el script de python entre la lectura y la escritura de los datos.
@Robin2 ya me has ayudado muchas veces y obviamente tuve una pregunta similar hace unos años ya que uso este método para leer los datos que estoy enviando desde el transmisor, hay una segunda función, parseData(), que divide las 3 variables que estoy enviando en variables individuales. Envío los datos a Serial1 en el mega.