Arranque y paro de un motor con arduino
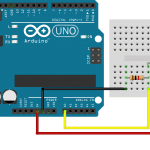
Pulsador de control de motor de corriente continua arduino
Un motor de corriente continua es el tipo de motor más común. Los motores de CC normalmente tienen sólo dos cables, uno positivo y otro negativo. Si conectas estos dos cables directamente a una batería, el motor girará. Si cambias los cables, el motor girará en la dirección opuesta.
En la función ‘loop’, el comando ‘Serial.parseInt’ se utiliza para leer el número introducido como texto en el Monitor Serial y convertirlo en un ‘int’. Puedes escribir cualquier número aquí. La declaración ‘if’ en la siguiente línea simplemente hace una escritura analógica con este número, si el número está entre 0 y 255.
Para controlar el sentido de giro del motor de corriente continua, sin intercambiar los cables, puedes utilizar un circuito llamado Puente H. Un puente H es un circuito electrónico que puede conducir el motor en ambas direcciones. Los puentes H se utilizan en muchas aplicaciones diferentes. Una de las aplicaciones más comunes es el control de motores en robots. Se llama puente H porque utiliza cuatro transistores conectados de tal manera que el diagrama esquemático parece una «H».
Cómo controlar el motor de corriente continua con el código de arduino
Tengo un Arduino UNO con 3 interruptores conectados (2 interruptores de límite, 1 interruptor de activación). Estoy tratando de hacer que el interruptor de activación gire el motor hacia adelante una vez golpeado, luego esperar a que cualquiera de los interruptores de límite sea golpeado y detenga el motor. El siguiente paso es esperar a que el interruptor de activación sea golpeado de nuevo y gire el motor en la dirección opuesta y esperar a que el interruptor de límite sea golpeado y pare el motor.
Pero el problema que tengo ahora es que cuando pulso el interruptor de activación la placa del arduino y la placa del puente H se reinician. Los LED’s se encienden y se apagan y el código se reinicia. Y no pasa nada. Sé que todos los interruptores y el motor funcionan porque los he probado simplificando el código con sólo las funciones.
Sería útil que tu pregunta incluyera un esquema. ¿Tienes resistencias pullup en línea con tus interruptores de activación y límite? Si no es así, es posible que la entrada esté «flotando», es decir, que devuelva aleatoriamente un valor ALTO o BAJO. Esto posiblemente causaría que el motor vaya hacia adelante y hacia atrás, pero debido a que el bucle está posiblemente ocurriendo cientos de veces por segundo, es posible que no veas nada en movimiento. Necesitas resistencias pull-up o pull-down en el circuito para que el Arduino pueda ver un LOW o HIGH definitivo. Ver https://www.arduino.cc/en/Tutorial/Button para un tutorial con una resistencia, o incluso mejor, utilizar https://www.arduino.cc/en/Tutorial/InputPullupSerial y utilizar las resistencias pullup existentes en la placa del Arduino, como sugiere Juraj a continuación.
Cómo hacer girar el motor de corriente continua en ambas direcciones usando arduino
En Device Plus se han presentado una gran variedad de aplicaciones para Arduino y ejemplos de piezas, pero conocer los fundamentos es especialmente importante cuando se crea algo. Por eso, en el artículo de hoy, repasaremos los fundamentos clave de Arduino. Quien nos enseñará esto hoy será el experto y autor de «¡Entrada en los fundamentos de la artesanía electrónica con Arduino!» Kazuhiro Fukuda.
Los motores se utilizan para hacer funcionar una gran variedad de máquinas, como drones y coches. Conectar motores a una fuente de alimentación hace posible que los componentes electrónicos generen movimiento de rotación. Conectar neumáticos o hélices a un motor también aumenta la rotación y el movimiento de las operaciones.
En Arduino, es posible controlar el motor. Al igual que con el LED, se puede controlar el motor para que gire o se detenga encendiendo y apagando la energía suministrada al motor. Cuando se combina con otros sensores, es posible establecer un control automático, como detener el motor cuando se acerca un obstáculo.
El motor gira en sentido contrario cuando se invierte el sentido de la alimentación conectada. También es posible cambiar la velocidad de rotación ajustando la cantidad de corriente que fluye. De este modo, es posible girar a gran velocidad cuando el motor está en movimiento o detenerse lentamente en una posición deseada reduciendo gradualmente la velocidad al detenerse. Incluso si un proyectil golpea los ventiladores, el motor puede retroceder y moverse en otras direcciones. Dicho esto, hoy vamos a repasar las formas de controlar un motor en Arduino.
Cómo detener el motor en el código de arduino
Ayuda con el softwareHola, estoy intentando entender Arduino con los pulsadores. Pero no consigo que el proyecto de prueba en el que estoy trabajando funcione como quiero que lo haga.Básicamente lo que estoy intentando hacer con los códigos de abajo es hacer que el pulsador arranque o pare el servomotor. Pero hasta ahora no he conseguido que funcione. También me pregunto por qué el servomotor no funciona en bucle. He probado varios métodos, pero no he conseguido que funcione. Gracias.Por cierto, soy un principiante.#include <Servo.h> //Servo Library.
Que básicamente alternará el buttonState por cada pulsación del botón. Y entonces usted puede comprobar sólo buttonState para cualquier condición que usted tiene. En lugar de mantener múltiples variables.Edit: No he revisado tu código en profundidad. Es posible que se me haya escapado algo.1CompartirInformeGuardarNivel 2Op – 1yBásicamente quiero crear un interruptor de palanca que encienda/apague el servomotor usando un botón. He intentado esto pero no consigo que el interruptor funcione.#include <Servo.h> //Servo Library.