Control de velocidad y giro de un motor dc con arduino
Controlar un motor de corriente continua con arduino
Un motor de corriente continua es el tipo de motor más común. Los motores de corriente continua suelen tener sólo dos cables, uno positivo y otro negativo. Si conectas estos dos cables directamente a una batería, el motor girará. Si cambias los cables, el motor girará en la dirección opuesta.
En la función ‘loop’, el comando ‘Serial.parseInt’ se utiliza para leer el número introducido como texto en el Monitor Serial y convertirlo en un ‘int’. Puedes escribir cualquier número aquí. La declaración ‘if’ en la siguiente línea simplemente hace una escritura analógica con este número, si el número está entre 0 y 255.
Para controlar el sentido de giro del motor de corriente continua, sin intercambiar los cables, puedes utilizar un circuito llamado Puente H. Un puente H es un circuito electrónico que puede conducir el motor en ambas direcciones. Los puentes H se utilizan en muchas aplicaciones diferentes. Una de las aplicaciones más comunes es el control de motores en robots. Se llama puente H porque utiliza cuatro transistores conectados de tal manera que el diagrama esquemático parece una «H».
Control de la velocidad del motor dc de arduino
int yAxis = analogRead(A1); // Leer el eje Y del joystickDespués de definir los pines, en la sección del bucle, comenzamos con la lectura de los valores del eje X e Y del joystick. El joystick está formado en realidad por dos potenciómetros que se conectan a las entradas analógicas del Arduino y tienen valores de 0 a 1023. Cuando el joystick se mantiene en su posición central el valor de ambos potenciómetros, o ejes, está en torno a 512. Añadiremos un poco de tolerancia y consideraremos los valores de 470 a 550 como centrales. Así que si movemos el eje Y del joystick hacia atrás y el valor es inferior a 470 pondremos el sentido de giro de los dos motores hacia atrás utilizando los cuatro pines de entrada. Entonces, convertiremos los valores decrecientes de 470 a 0 en valores PWM crecientes de 0 a 255 que es en realidad la velocidad del motor.// Eje Y utilizado para el control hacia adelante y hacia atrás
}Similarmente, si movemos el eje Y del joystick hacia adelante y el valor va por encima de 550 configuraremos los motores para que se muevan hacia adelante y convertiremos las lecturas de 550 a 1023 en valores PWM de 0 a 255. Si el joystick se mantiene en su centro la velocidad de los motores será cero.A continuación vamos a ver como utilizamos el eje X para el control izquierdo y derecho del coche.// Eje X utilizado para el control izquierdo y derecho
Control de la velocidad del motor de corriente continua usando arduino y potenciómetro
En este proyecto, le mostraré cómo lograr el control de velocidad y dirección de un motor de corriente continua utilizando Arduino UNO. Se trata de un proyecto sencillo utilizando Arduino UNO y algunos componentes fácilmente disponibles para controlar la velocidad de rotación de un motor de corriente continua y también su dirección de rotación.
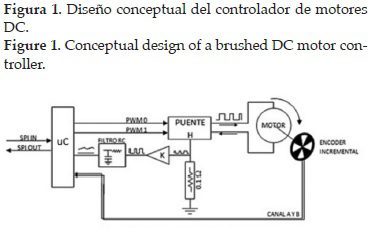
Generalmente, cuando un motor de corriente continua se asocia con cualquier sistema basado en un microcontrolador, a menudo se conecta utilizando un controlador de motor IC. Un IC controlador de motor proporciona la corriente necesaria para que el motor funcione. También puede controlar la dirección de la rotación.
En este proyecto, se diseña un control de velocidad y dirección del motor de corriente continua basado en Arduino sin utilizar el IC del controlador del motor. Un motor de CC no puede ser conectado a un microcontrolador ya que la corriente de salida del microcontrolador es muy pequeña y no puede conducir el motor.
Se trata de una placa de prototipos basada en un microcontrolador. El microcontrolador utilizado en la placa Arduino Uno es el ATmega328p. Arduino se encarga de controlar la velocidad y la dirección del motor con la ayuda de otros componentes.
Control de la velocidad de un motor de corriente continua usando arduino pdf
Un motor de corriente continua es el tipo de motor más común. Los motores de CC normalmente tienen sólo dos cables, uno positivo y otro negativo. Si conectas estos dos cables directamente a una batería, el motor girará. Si cambias los cables, el motor girará en la dirección opuesta.
En la función ‘loop’, el comando ‘Serial.parseInt’ se utiliza para leer el número introducido como texto en el Monitor Serial y convertirlo en un ‘int’. Puedes escribir cualquier número aquí. La declaración ‘if’ en la siguiente línea simplemente hace una escritura analógica con este número, si el número está entre 0 y 255.
Para controlar el sentido de giro del motor de corriente continua, sin intercambiar los cables, puedes utilizar un circuito llamado Puente H. Un puente H es un circuito electrónico que puede conducir el motor en ambas direcciones. Los puentes H se utilizan en muchas aplicaciones diferentes. Una de las aplicaciones más comunes es el control de motores en robots. Se llama puente H porque utiliza cuatro transistores conectados de tal manera que el diagrama esquemático parece una «H».