Codigos para robot sumo arduino
sensores para robots de sumo
¿Ha visto alguna vez un combate de sumo? ¿Y qué hay de los robots que hacen lucha de sumo? Sí, existe el robot de sumo, que también se considera un deporte. Se trata de un deporte en el que dos robots intentan empujarse mutuamente fuera de un círculo, normalmente igual que el combate de sumo real. Para hacerlo más desafiante, los competidores tienen que programar los robots de tal manera que encuentren a su oponente (normalmente se consigue con sensores infrarrojos o ultrasónicos) y lo empujen fuera de la arena plana. El robot también debe evitar salir de la arena, normalmente mediante un sensor que detecta el borde.
Todos estos consejos y trucos pueden realizarse mediante la programación de robots de sumo. Puedes crear potentes e innovadores robots de sumo programándolos a través de Arduino. Las estrategias de programación para el combate robótico son posibles mediante el uso de sumo robot para Arduino – Esto le permitirá programar y descargar el código C en su kit de sumo inteligente Rokit que es otro componente que usted necesita en la construcción de su robot de sumo. El kit de sumo inteligente Rokit se puede comprar en Robolink. Configurando Arduino a Rokit Smart, podrás crear estrategias de programación listas para el combate robótico. La configuración del controlador USB de smart inventor también es un requisito para construir este super robot. Sólo con conectar el controlador USB de smart inventor a tu ordenador y a la placa base de Rokit Smart, ¡ya está todo listo!
tutorial básico de sumo robot autónomo con arduino
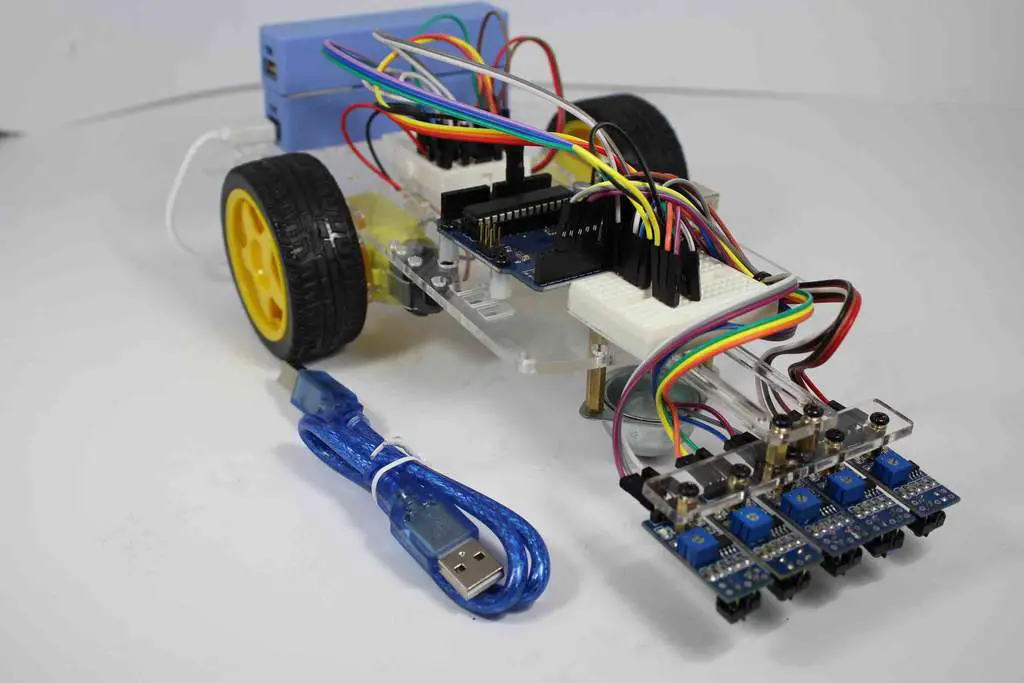
Selección de componentesDado que somos libres de utilizar los recursos de la empresa, intentaremos utilizar lo que tenemos en nuestro almacén, por lo que algunos de los componentes pueden no ser la mejor opción. Usted debe explorar más lo que está disponible en el mercado para dar a su robot el mejor rendimiento si están dentro de su presupuesto.Hay 5 componentes principales en un Robot Sumo.
1. Elige el controlador con el que estés familiarizado. Si usted no tiene ninguna preferencia, yo sugeriría fuertemente que usted vaya para Arduino simplemente porque estamos utilizando la placa Arduino y se puede utilizar nuestro código de ejemplo para start.Whether usted está usando Arduino Uno, Mega o Nano, no se olvide que usted todavía necesita un controlador de motor de 2 canales para conducir sus motores de alta potencia y una placa de expansión para conectar todos sus sensores. Puedes construir tu propia placa de expansión y conectar todos los pines a tu Arduino con puentes o conseguir una placa integrada de nuestra compañía donde puedes conectar todas las partes electrónicas en una sola placa para eliminar la molestia del cableado.Controlador principal + Drivers de motor + Breadboard
robot-sumo
El ensamblaje de los robots, la construcción del anillo SumoBot, y la eventual programación de BlocklyProp crearán participación y colaboración en STEM. Con estos diferentes aspectos de construcción, programación y fabricación, el proceso es más inclusivo que un proyecto centrado exclusivamente en la codificación. Las competiciones en clase son muy divertidas. Los estudiantes codificarán sus estrategias en los robots. Por ejemplo, en lugar de girar para localizar y empujar al oponente, escapan rápidamente y rodean el anillo e intentan localizarlo y empujarlo por el lado o por detrás.
Serie de tutoriales del SumoBot WX – Estos tutoriales web te guían paso a paso en la construcción de cada Robot SumoBot WX. Los tutoriales proporcionan ejemplos y para codificar y probar los diferentes subsistemas (motores, sensores QTI, emisores/detectores de infrarrojos) pero dejan la integración completa y el código de competición en manos del estudiante. El SumoBot WX no tiene material de evaluación específico.
9:59ev3 tutorial de programación del robot sumo – k3mosab3builderdude35youtube – 11 feb 2016
Este es el código base que utilizaremos inicialmente para probar tu micro-servo SumoBot y comprobar que funciona bien. Eres libre de modificar el código para que tu robot sea más competitivo; de hecho, te animamos a que experimentes mucho con él para que entiendas a fondo el código. No tengas miedo de «romperlo»; siempre puedes descargar el código base y empezar de nuevo.
La premisa del código es bastante sencilla: moverse por el campo de juego mientras se controla el sensor de luz/oscuridad que mira hacia abajo. Se mueve hacia adelante a una velocidad media hasta que su sensor telémetro Sharp, que mira hacia adelante, ve algo (su oponente), entonces va a toda velocidad hacia adelante tratando de empujar al oponente fuera del anillo. Si se detecta el borde blanco, el robot se detiene, retrocede lentamente y gira un poco antes de seguir adelante.