Medir rpm de un motor con arduino
Sensor de medición de rpm
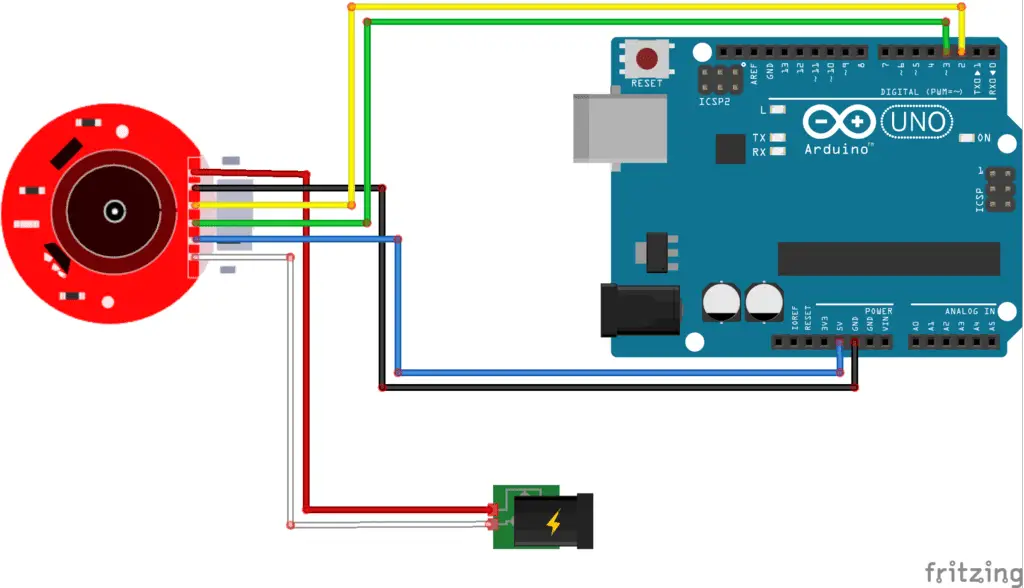
Contador de RPM de Arduino y Controlador de Velocidad Constante del Motor DC- En este tutorial, aprenderás cómo hacer un contador de RPM y cómo ajustar automáticamente la velocidad de un motor DC. En este proyecto, el sensor IR se utilizará con el Arduino Uno para la medición de RPM y un potenciómetro / resistencia variable se utilizará para establecer el valor de RPM. El valor de RPM en tiempo real se comparará con el valor de RPM preestablecido y luego el Arduino aumentará o disminuirá la velocidad del motor de corriente continua automáticamente.
RPM significa «Revoluciones por minuto». El contador de RPM también se conoce como Tacómetro, contador de revoluciones, tacómetro, contador de revoluciones y medidor de RPM. El contador de RPM o Tacómetro es un instrumento o dispositivo que se utiliza para medir la velocidad de rotación de un eje o disco de un motor o cualquier objeto giratorio.
Se trata de un sensor infrarrojo. Tiene dos LEDs. El blanco es el LED transmisor mientras que el negro es el LED receptor. El rango puede ser ajustado usando la resistencia variable. El rango de detección también se ve afectado por el color del objeto, si colocas un objeto de color Negro el rango de detección disminuirá y para un objeto Blanco, el rango se incrementa. Para conseguir un buen reflejo, utilice un adhesivo de color blanco en la superficie del objeto.
Código del sensor de rpm de arduino
Contador de RPM Arduino y Controlador de Velocidad Constante del Motor DC- En este tutorial, aprenderás cómo hacer un contador de RPM y cómo ajustar automáticamente la velocidad de un motor DC. En este proyecto, el sensor IR se utilizará con el Arduino Uno para la medición de RPM y un potenciómetro / resistencia variable se utilizará para establecer el valor de RPM. El valor de RPM en tiempo real se comparará con el valor de RPM preestablecido y luego el Arduino aumentará o disminuirá la velocidad del motor de corriente continua automáticamente.
RPM significa «Revoluciones por minuto». El contador de RPM es también conocido como Tacómetro, contador de revoluciones, tacómetro, contador de revoluciones y medidor de RPM. El contador de RPM o Tacómetro es un instrumento o dispositivo que se utiliza para medir la velocidad de rotación de un eje o disco de un motor o cualquier objeto giratorio.
Se trata de un sensor infrarrojo. Tiene dos LEDs. El blanco es el LED transmisor mientras que el negro es el LED receptor. El rango puede ser ajustado usando la resistencia variable. El rango de detección también se ve afectado por el color del objeto, si colocas un objeto de color Negro el rango de detección disminuirá y para un objeto Blanco, el rango se incrementa. Para conseguir un buen reflejo, utilice un adhesivo de color blanco en la superficie del objeto.
Control de la velocidad del motor dc de arduino con encoder
Actualmente estoy tratando de configurar un Arduino Uno y un sensor de efecto Hall (A3144) para medir las RPM de un motor. He probado el sensor, y lee «0» cuando detecta el imán, y «1» cuando el imán se retira. También he escrito un código que pensé que iba a funcionar, pero cuando pruebo mi programa, no aparece nada en el Monitor Serial. Si alguien tiene alguna idea de cómo puedo cambiar mi código para que funcione, ¡agradecería mucho algún consejo!
Aquí está una recreación de su código, no me odie si no funciona el primer intento, acabo de confirmar que se compila y no se depura. Tengo una configuración muy similar que está trabajando como una unidad de control del motor (ECU) la operación en un Teensy 4.0, por lo que la obtención de RPM utilizando un método similar está demostrado que funciona.
El problema está en la variable «hall_thresh». Desde que se empieza a contar desde el número 1 (float hall_count = 1.0;) el bucle while está esperando 99 veces (99 veces de poner el imán cerca del sensor y alejarlo) entonces lo comparará con «hall_thresh».
Código de control de velocidad del motor arduino
Pasa la forma de onda de la corriente a tu ADC y escribe algún software hábil o utiliza un circuito comparador para detectar picos y tendrás tu velocidad. Puedes ver la medición realizada y descrita en for(embed).
Cada motor tiene una constante BEMF. Así que si se ejecuta sin carga, se puede decir que la velocidad es igual a la tensión por k. Dado que cada motor tiene alguna carga mínima siempre (y por lo general no es mínima, los motores existen para conducir las cargas), la tensión real tiene otro componente, la corriente por la resistencia del motor. Así que si se mide la corriente, también se puede calcular. Y la mejor manera de saber la constante BEMF es medirla. La indicada en la hoja de datos puede variar entre motores.
La contrafase es directamente proporcional a la velocidad. La constante de contrafase es numéricamente igual a la constante de par y normalmente se indica en la hoja de datos. Alternativamente, calibre la velocidad del motor frente a la contrafase mediante una medición.
La fuente de tensión tendrá una tensión proporcional a la velocidad del rotor, la constante de tensión \$K_e\$: Voltios por RPM (o rads dependiendo de la hoja de datos). Cuanto más rápido gire el rotor, mayor será este valor.