Mpu6050 arduino library download
mpu6050 arduino library github
La familia MPU-6000™ proporciona la primera solución MotionProcessing™ integrada de 6 ejes del mundo que elimina la desalineación de los ejes cruzados del giroscopio/acelerador a nivel de paquete asociada a las soluciones discretas. Los dispositivos combinan un giroscopio de 3 ejes y un acelerómetro de 3 ejes en la misma matriz de silicio junto con un Digital Motion Processor™ (DMP™) integrado capaz de procesar complejos algoritmos MotionFusion de 9 ejes. Los algoritmos MotionFusion de 9 ejes integrados en las piezas acceden a magnetómetros externos u otros sensores a través de un bus I2C maestro auxiliar, lo que permite a los dispositivos recopilar un conjunto completo de datos de sensores sin intervención del procesador del sistema. Los dispositivos se ofrecen en la misma huella QFN de 4x4x0,9 mm y con la misma distribución de pines que la actual familia MPU-3000™ de giroscopios de 3 ejes integrados, lo que proporciona una vía de actualización sencilla y facilita su colocación en placas con limitaciones de espacio.(Fuente: descripción del producto de InvenSense, 28/09/2011)
[0x00] AUX_VDDIOSelección de alimentación I2C auxiliar (AUX_VDDIO @ 0x00)Campos de bits del registroEste registro especifica el nivel de tensión de alimentación I2C auxiliar. Los bits 6 a 0 están reservados.R/W[7] AUX_VDDIOAUX_VDDIO @ 0x00AUX_VDDIO [7]OpcionesAUX_VDDIO configura el nivel lógico alto del bus I2C auxiliar para que sea VLOGIC o VDD. Cuando se establece en 1, el nivel lógico alto del bus I2C auxiliar es VDD. Cuando se borra a 0, el nivel lógico alto del bus I2C auxiliar es VLOGIC. [6:1] XG_OFFS_TC[0] OTP_BNK_VLD[0x01] YG_OFFS_TCR/W [6:1] YG_OFFS_TC [0x02] ZG_OFFS_TCR/W [6:1] ZG_OFFS_TC [0x03] X_FINE_GAINR/W[7:0] X_FINE_GAIN[0x04] Y_FINE_GAINR/W[7: 0] Y_FINE_GAIN[0x05] Z_FINE_GAINR/W[7:0] Z_FINE_GAIN[0x06] XA_OFFS_HR/W[15:0] XA_OFFS[0x07] XA_OFFS_L_TCR/W[0x08] YA_OFFS_HR/W[15:0] YA_OFFS[0x09] YA_OFFS_L_TCR/W[0x0A] ZA_OFFS_HR/W[15: 0] ZA_OFFS[0x0B] ZA_OFFS_L_TCR/W[0x13] XG_OFFS_USRHR/W[15:0] XG_OFFS_USR[0x14] XG_OFFS_USRLR/W[0x15] YG_OFFS_USRHR/W[15:0] YG_OFFS_USR[0x16] YG_OFFS_USRLR/W[0x17] ZG_OFFS_USRHR/W[15: 0] ZG_OFFS_USR[0x18] ZG_OFFS_USRLR/W[0x19] SMPLRT_DIVDivisor de la tasa de muestreo (SMPLRT_DIV @ 0x19)Campos de bits del registroEste registro especifica el divisor de la tasa de salida del giroscopio utilizado para generar la tasa de muestreo para el MPU-60X0.5:55mpu 6050 arduino tutorial para principiantesmission criticalyoutube – 15 mayo 2020
MPU6050 Arduino- Este es mi primer tutorial de iniciación al módulo de giroscopio y acelerómetro de seis grados de libertad MPU6050 GY-521. Como es habitual, antes de realizar cualquier proyecto de nivel intermedio o avanzado, primero voy a explicar los fundamentos que todo principiante debe conocer. En este tutorial, voy a tratar de mantener las cosas simples para que puedas entender fácilmente todo el mecanismo.
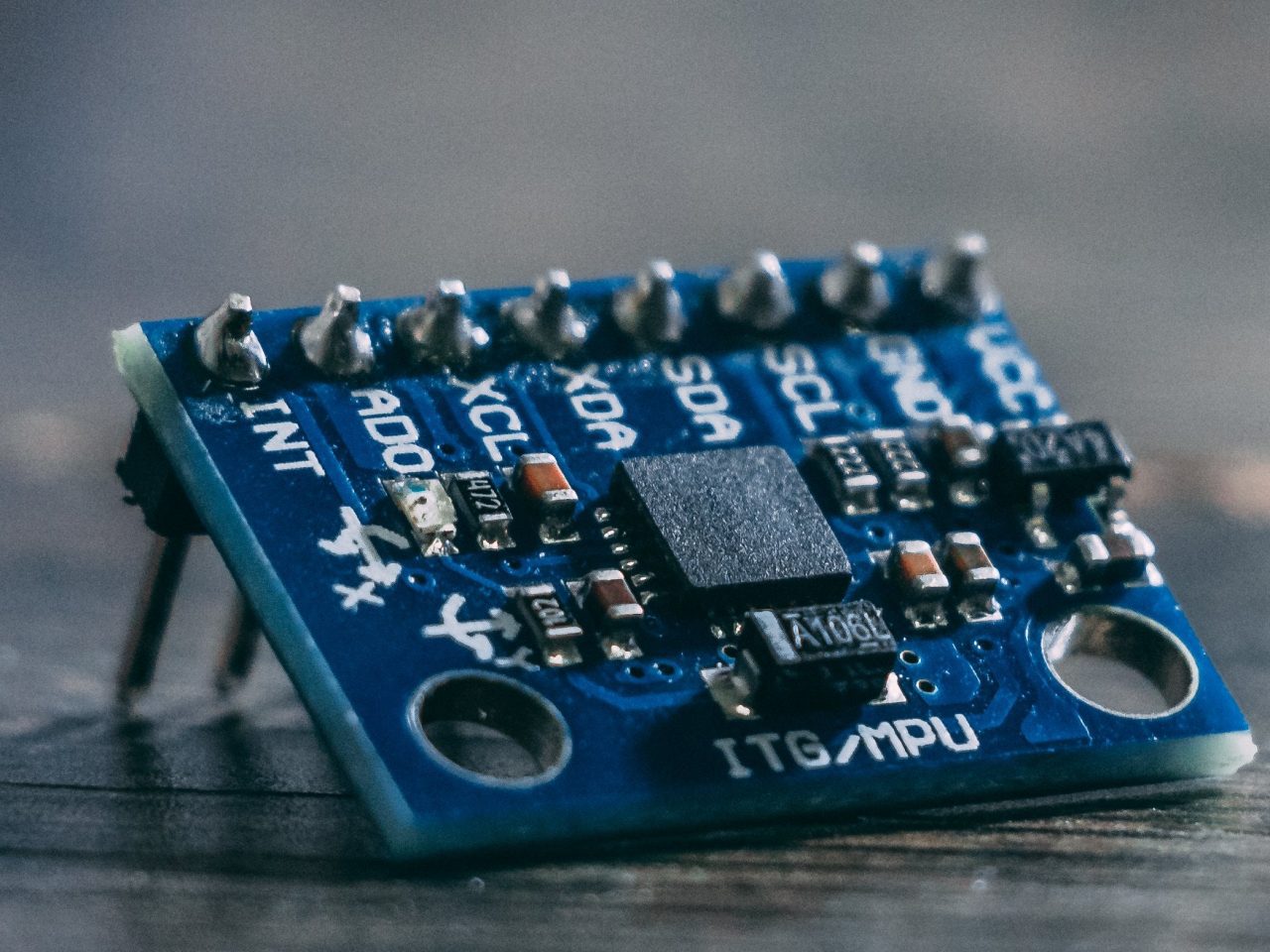
Este es el módulo de giroscopio y acelerómetro de 3 ejes GY-521 MPU6050. El MPU6050 se comunica con el Arduino a través del protocolo I2C. El MPU6050 siempre actúa como esclavo del Arduino con los pines SDA y SCL conectados al bus I2C. Este módulo necesita de 3 a 5 voltios. Este módulo puede ser utilizado en un Robot controlado por gestos de la mano, silla de ruedas, sistema de detección de terremotos, Robot de auto-equilibrio, la plataforma de auto-equilibrio para una cámara, Segway, etc.
Como puedes ver claramente este módulo tiene un total de 8 Pines que están claramente etiquetados. De estos 8 pines sólo voy a utilizar el VCC, GND, SCL, SDA, e INT. Echemos un vistazo al diagrama de conexiones.
14:01códigoarduino para mpu-6050 con pantalla lcd1602-i2c – robojaxrobojaxrobojax – 6 jul 2018
MPU6050 Arduino- Este es mi primer tutorial de iniciación al módulo de giroscopio y acelerómetro de seis grados de libertad MPU6050 GY-521. Como es habitual, antes de realizar cualquier proyecto de nivel intermedio o avanzado, primero voy a explicar los fundamentos que todo principiante debe conocer. En este tutorial, voy a tratar de mantener las cosas simples para que puedas entender fácilmente todo el mecanismo.
Este es el módulo de giroscopio y acelerómetro de 3 ejes GY-521 MPU6050. El MPU6050 se comunica con el Arduino a través del protocolo I2C. El MPU6050 siempre actúa como esclavo del Arduino con los pines SDA y SCL conectados al bus I2C. Este módulo necesita de 3 a 5 voltios. Este módulo puede ser utilizado en un Robot controlado por gestos de la mano, silla de ruedas, sistema de detección de terremotos, Robot de auto-equilibrio, la plataforma de auto-equilibrio para una cámara, Segway, etc.
Como puedes ver claramente este módulo tiene un total de 8 Pines que están claramente etiquetados. De estos 8 pines sólo voy a utilizar el VCC, GND, SCL, SDA, e INT. Echemos un vistazo al diagrama de conexiones.
funciones de la biblioteca mpu6050
MPU6050 Arduino- Este es mi primer tutorial de iniciación al módulo de giroscopio y acelerómetro de seis grados de libertad MPU6050 GY-521. Como es habitual, antes de realizar cualquier proyecto de nivel intermedio o avanzado, primero voy a explicar los fundamentos que todo principiante debe conocer. En este tutorial, voy a tratar de mantener las cosas simples para que puedas entender fácilmente todo el mecanismo.
Este es el módulo de giroscopio y acelerómetro de 3 ejes GY-521 MPU6050. El MPU6050 se comunica con el Arduino a través del protocolo I2C. El MPU6050 siempre actúa como esclavo del Arduino con los pines SDA y SCL conectados al bus I2C. Este módulo necesita de 3 a 5 voltios. Este módulo puede ser utilizado en un Robot controlado por gestos de la mano, silla de ruedas, sistema de detección de terremotos, Robot de auto-equilibrio, la plataforma de auto-equilibrio para una cámara, Segway, etc.
Como puedes ver claramente este módulo tiene un total de 8 Pines que están claramente etiquetados. De estos 8 pines sólo voy a utilizar el VCC, GND, SCL, SDA, e INT. Echemos un vistazo al diagrama de conexiones.