Programa para mover servomotor con arduino
Código arduino para el control de la velocidad del servo motor
Después de algunas pruebas llegué a los siguientes valores para la duración de los pulsos que funcionan con mi servo. Los pulsos de 0,6ms de duración corresponden a la posición de 0 grados, 1,45ms a 90 grados y 2,3ms a 180 grados.Conecté un multímetro en serie con el servo para comprobar el consumo de corriente. El máximo consumo de corriente que noté fue de hasta 0,63A en la posición de parada. Bueno, eso es porque este no es el servo original TowerPro MG996R, sino una réplica más barata, que obviamente tiene peor rendimiento.Sin embargo, vamos a echar un vistazo a una forma más conveniente de controlar los servos utilizando Arduino. Es decir, utilizando la biblioteca de servos de Arduino.
Código del servomotor continuo en arduino
Los servomotores se pueden encontrar en brazos robóticos, cámaras, tornos, máquinas CNC, prensas de impresión y otras aplicaciones de ingeniería donde se requiere precisión y movimientos repetidos. Los servomotores suelen estar compuestos por motores de corriente continua que utilizan mecanismos de retroalimentación para moverse con gran precisión de una posición a otra. Los servos de bajo coste que se encuentran en los proyectos maker utilizan potenciómetros para registrar los voltajes como posiciones en el plano de rotación del servo. A menudo, los servomotores contienen una serie de engranajes que aceleran o ralentizan y suavizan el movimiento del motor de corriente continua. Por último, los servomotores utilizan un circuito para controlar y enviar información de retroalimentación a un controlador determinado, que en nuestro caso es una placa Arduino (lee más sobre servomotores aquí). En este tutorial, se utilizará una placa Arduino para alimentar y controlar un pequeño servomotor. Se explorarán los fundamentos y la composición de un SG90, y se dará la aplicación de varios códigos y aplicaciones para otro tipo de servomotor, el MG90S. El objetivo de este proyecto es introducir a los usuarios en el funcionamiento de un servomotor, cómo PWM (modulación de ancho de pulso) controla un servomotor, y cómo Arduino puede interactuar con los servomotores para producir los movimientos deseados con gran precisión.
Biblioteca de servos de arduino
En este tutorial, aprenderás cómo funcionan los servomotores y cómo controlarlos con Arduino. He incluido diagramas de cableado y varios códigos de ejemplo. Los servomotores se utilizan a menudo en proyectos de robótica, pero también se pueden encontrar en coches RC, aviones, etc. Son muy útiles cuando se necesita un control preciso de la posición y/o un par elevado.
En la primera parte de este artículo, veremos el funcionamiento interno de un servo y qué tipo de señal de control utiliza. También explicaré cuáles son las diferencias entre un servo estándar y uno continuo. A continuación, te mostraré cómo conectar un servomotor al Arduino.
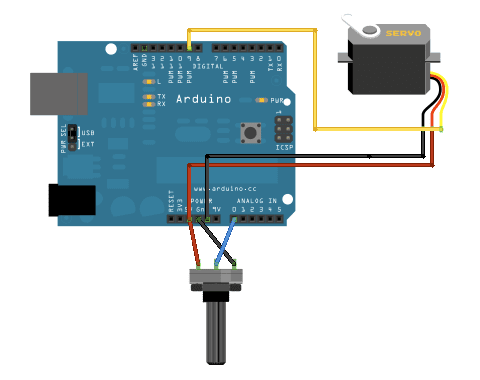
Con el primer ejemplo de código, puedes controlar tanto la posición como la velocidad del servomotor. Después, veremos cómo controlar un servo con un potenciómetro y cómo puedes modificar el código para controlar varios servomotores al mismo tiempo. Por último, al final de este artículo, puedes encontrar las especificaciones y dimensiones de algunos de los servomotores más populares del mercado.
Servomotor código arduino 90 grados
Hemos construido algunos proyectos que han utilizado motores para hacer que las cosas se muevan y en el camino hemos visto algunos de los diferentes tipos de motores que podemos controlar con nuestros proyectos de Arduino y Raspberry Pi.
Hemos trabajado con motores básicos de corriente continua unas cuantas veces. Construimos un par de proyectos de robótica que se basan en motores de CC y también echamos un vistazo extenso al controlador de puente H que se utiliza comúnmente para regular la velocidad y la dirección de un motor de CC con un microcontrolador o microordenador.
Otro tipo de motor con el que hemos trabajado es el motor paso a paso. Este tipo de motor tiene su eje impulsado en pasos discretos, lo que permite un control muy preciso. Son muy utilizados en diseños de impresoras y robótica.
Un servomotor es un motor de baja velocidad y alto par que viene en una variedad de tamaños. A diferencia de los motores de corriente continua y de los motores paso a paso, el servomotor no suele girar 360 grados. En cambio, está limitado a un rango de 180, 270 o 90 grados.
Una señal de control es enviada al servo para posicionar el eje en el ángulo deseado. Esta disposición con una sola señal hace que los servos sean sencillos de utilizar en diseños de radio y control remoto, así como con microcontroladores.