Robot esquiva obstaculos arduino codigo
Obstáculo evitando robot usando sensor ultrasónico arduino con servo
Un proyecto simple en el obstáculo que evita el robot se diseña aquí. La robótica es un campo interesante y de rápido crecimiento. Siendo una rama de la ingeniería, las aplicaciones de la robótica están aumentando con el avance de la tecnología.
Hay muchos tipos de técnicas de navegación de robots móviles como la planificación de rutas, la auto-localización y la interpretación de mapas. Un Robot Evitador de Obstáculos es un tipo de robot móvil autónomo que evita la colisión con obstáculos inesperados.
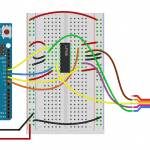
El sensor ultrasónico tiene 4 pines: Vcc, Trig, Echo y Gnd. Vcc y Gnd se conectan a los pines +5v y GND del Arduino. Trig (Disparo) se conecta al 9º pin y Echo se conecta al 8º pin del Arduino UNO respectivamente.
Un servomotor se utiliza para girar el sensor ultrasónico para buscar obstáculos. Tiene tres pines: Control, VCC y GND. El pin de control del servo está conectado al pin 11 de Arduino mientras que el VCC y GND están conectados a +5V y GND.
El L293D es un CI de 16 pines. Los pines 1 y 9 son los pines de habilitación. Estos pines están conectados a +5V. Los pines 2 y 7 son las entradas de control del microcontrolador para el primer motor. Están conectados a los pines 6 y 7 de Arduino respectivamente.
Código de arduino para evitar obstáculos en el coche
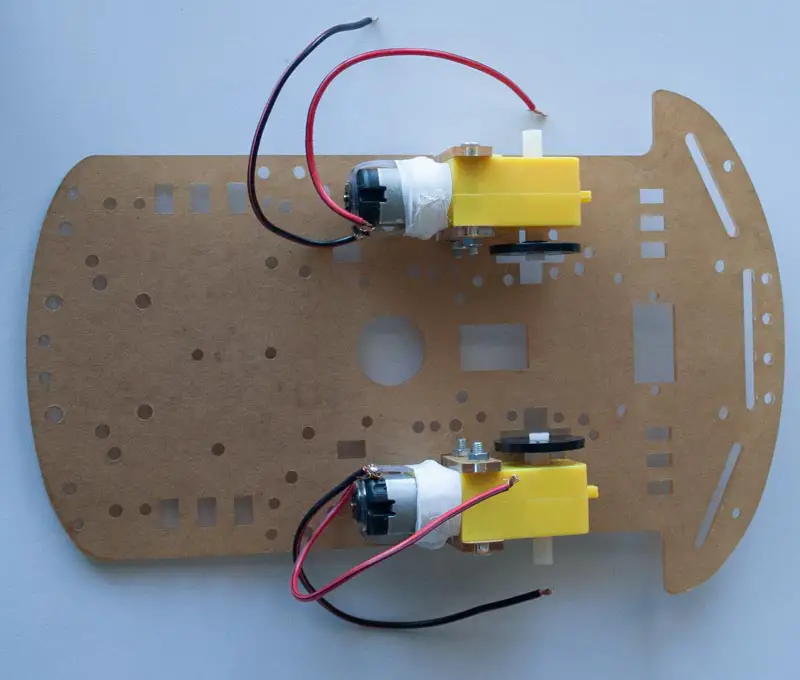
Ahora que el robot tiene su cerebro (Arduino montado en la parte trasera del robot) y un cuerpo, necesita un «sistema nervioso», líneas de comunicación que permitan al cerebro transmitir señales hacia y desde las diferentes partes de su cuerpo. En el contexto de este proyecto, esas líneas de comunicación son los cables que necesitamos conectar entre las diferentes partes del robot que estamos construyendo.
Antes de conectar cualquier cable o componente, es una buena práctica diseñar el diagrama del circuito. Para todos mis proyectos de Arduino, utilizo un software llamado Fritzing, pero incluso puedes planificar tus circuitos a mano.
Para probar la conexión de tu motor, tendrás que conectar la pila de 9V (la que está en la parte trasera del robot, entre las piezas de la base superior e inferior) a la protoboard de 400 puntos sin soldadura, como se muestra en el diagrama del circuito.
Mientras se ejecuta el programa, haz clic en la lupa de la esquina superior derecha del IDE de Arduino. Deberías ver las distancias de cada sensor al objeto más cercano (en pulgadas). Si agitas la mano delante de los sensores, puedes ver cómo cambian las lecturas.
Código de robot para evitar obstáculos
ReplyUpvoteHe tenido una docena de estudiantes de HS hacer esto, tutorial es fácil para ellos seguir, sin embargo, todos ellos corren en círculos. cambiar los motores no hace ninguna diferencia. El código se ha estudiado y por mi parte no encuentro el problema.0bikeman2
ResponderUpvoteSoy un profesor que utiliza este robot en mi curso. Estamos teniendo problemas para que los motores reaccionen, no giran. El servo reacciona correctamente cuando pasamos la mano por delante del ultrasonido pero los motores no giran. Hemos comprobado tres veces el circuito y estamos bastante seguros de que es correcto. Hemos medido la batería de litio y tenemos 8,4 V a plena carga.0nortok00Pregunta
ResponderUpvoteHola. Puedes utilizar cualquier tipo de breadboard ya sea mini o normal. Aquí he utilizado sólo los carriles de una mini breadboard. En una breadboard (la mayoría de los tipos) tiene dos formas de líneas de conexión, verticalmente y horizontalmente. Por favor, estudia el patrón de conexión en una protoboard. Una vez que tengas la idea, puedes decidir tus conexiones en el robot.0singhyoshima994Pregunta
Robot evita-obstáculos usando arduino y código l293d
El Robot Evitador de Obstáculos es un dispositivo inteligente que puede detectar automáticamente el obstáculo que tiene delante y evitarlo girando él mismo en otra dirección. Este diseño permite al robot navegar en un entorno desconocido evitando colisiones, lo que es un requisito primordial para cualquier robot móvil autónomo. La aplicación del robot evasor de obstáculos no es limitada y se utiliza en la mayoría de las organizaciones militares ahora que ayuda a llevar a cabo muchos trabajos arriesgados que no pueden ser realizados por cualquier soldado.
Anteriormente construimos un Robot Evitador de Obstáculos usando Raspberry Pi y usando un Microcontrolador PIC. Esta vez vamos a construir un obstáculo evitando robot utilizando un sensor de ultrasonidos y Arduino. Aquí un sensor ultrasónico se utiliza para detectar los obstáculos en el camino mediante el cálculo de la distancia entre el robot y el obstáculo. Si el robot encuentra algún obstáculo, cambia la dirección y continúa moviéndose.
Antes de ir a construir el robot, es importante entender cómo funciona el sensor de ultrasonidos porque este sensor tendrá un papel importante en la detección de obstáculos. El principio básico del funcionamiento del sensor de ultrasonidos consiste en anotar el tiempo que tarda el sensor en transmitir los haces de ultrasonidos y en recibirlos después de chocar con la superficie. A continuación, se calcula la distancia mediante una fórmula. En este proyecto se utiliza el sensor ultrasónico HC-SR04, ampliamente disponible. Para utilizar este sensor, se seguirá un enfoque similar al explicado anteriormente.