Raspberry pi servo motor control
5:10¡¡modo fácil!!! de controlar múltiples servos con la frambuesa pimaker tutoryoutube – 31 ene 2020
gpio pwmr 2000¡Por fin podremos poner en movimiento nuestro motor! Ten en cuenta que no pasamos un ángulo al servomotor, sino un número que se convertirá en un ángulo. Nuestro servomotor va de 0 ° a 180 °. Después de algunas pruebas, parece que 0 ° corresponde a 230, 90 ° a 150 y 180 ° a 70.Para enviar nuestro motor a 90 ° por lo tanto vamos a utilizar el comando:gpio -g pwm 18 150Y vamos a reemplazar 150 por 230 para ir a 0 °, 70 para ir a 180 ° o cualquier valor intermedio como necesitamos.Tenga en cuenta, estos pequeños motores soportan un ángulo de 180 ° de una manera precisa, pero tienen un pequeño margen que puede hacer que se 190 ° o 200 ° e incluso para hacer una vuelta completa si se pone un valor suficientemente bajo. Es específico de cada modelo de motor.Manejar el servomotor con PythonComo en los anteriores tutoriales de esta serie, el objetivo es más bien controlar nuestro motor con Python que directamente desde las líneas de comando. Considero que ya tienes los fundamentos de Python, si no es así ve a leer los tutoriales anteriores, los enlaces están disponibles al principio de este artículo.Para controlar nuestro motor desde un script de Python usaremos una vez más la lib Rpi.GPIO.En Python y en la Pi, el ángulo del motor se calcula como un porcentaje del ciclo. Este porcentaje se llama «Duty Cycle».Una señal de 0,5ms corresponde a 0 ° y una señal de 2,5ms a 180 °. Sabiendo que nuestro ciclo es de 50 Hz, es decir, 20ms, esto nos permite calcular el Duty Cycle para 0 ° y 180 ° así:x = 0,5 / 20
python servo biblioteca
En este tutorial, aprenderemos a interconectar el servomotor con el módulo Raspberry pi y operarlo con la aplicación Blynk. y Este proyecto intentaré mostrarlo muy fácil y bonito paso a paso. Si empiezas este proyecto conmigo entonces creo que puedes completarlo también. Es un proceso muy sencillo.
La Raspberry Pi es un ordenador de bajo coste, del tamaño de una tarjeta de crédito, que se conecta a un monitor de ordenador o a un televisor, y utiliza un teclado y un ratón estándar. Es un pequeño dispositivo capaz que permite a personas de todas las edades explorar la informática y aprender a programar en lenguajes como Scratch y Python. Es capaz de hacer todo lo que se espera de un ordenador de sobremesa, desde navegar por Internet y reproducir vídeo de alta definición, hasta hacer hojas de cálculo, procesar textos y jugar.
Es más, la Raspberry Pi tiene la capacidad de interactuar con el mundo exterior y se ha utilizado en una amplia gama de proyectos de fabricantes digitales, desde máquinas de música y detectores de padres hasta estaciones meteorológicas y casas de pájaros con cámaras de infrarrojos. Queremos que los niños de todo el mundo utilicen la Raspberry Pi para aprender a programar y entender cómo funcionan los ordenadores.
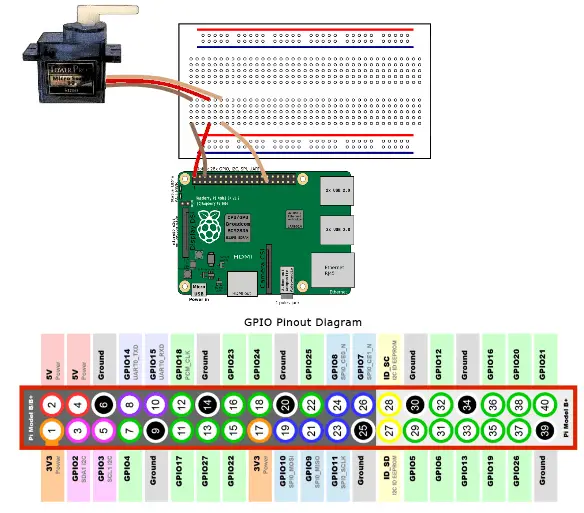
alimentación externa del servomotor de raspberry pi
Interconectar servomotores puede ser una tarea esencial en muchos proyectos, como la construcción de un robot personalizado. Hay varios métodos que uno puede emplear para interconectar servomotores con una Raspberry Pi. Este artículo presenta dos de ellos y explica cómo funcionan los servomotores. Este conocimiento debería permitir al lector controlar los servos con diferentes microcontroladores o incluso con un simple circuito basado en un temporizador 555.
Normalmente, la señal de entrada está modulada por ancho de pulso (PWM) y su frecuencia no cambia con el tiempo. En cambio, el servomotor gira a un determinado ángulo cuando el ciclo de trabajo de la señal de entrada PWM cambia. El servo utilizado en este ejemplo puede girar 180 grados en total (90 grados en cada dirección). Cuando el ciclo de trabajo es del 5% (un pulso alto de un milisegundo de duración), el servo gira a su posición mínima. Si el ciclo de trabajo cambia al 10% (que es un pulso alto de dos milisegundos de duración), el servo gira completamente hacia la derecha. Los ciclos de trabajo intermedios se correlacionan con diferentes ángulos entre -90° y +90°. Sin embargo, estos números pueden variar para diferentes servos y entre fabricantes. Por lo tanto, siempre es necesario consultar la hoja de datos del servo.
raspberry pi 4 servo
La Raspberry Pi es un potente ordenador que permite a los usuarios aprovechar la potencia de un microordenador y, al mismo tiempo, aprovechar las entradas/salidas de propósito general (GPIO). Las entradas y salidas facilitan a los ingenieros y fabricantes la medición, el control y la supervisión de los dispositivos. En este tutorial, los pines GPIO de una Raspberry Pi se utilizarán para alimentar y controlar un servomotor MG90S que requiere la modulación de ancho de pulso (PWM) para controlar la rotación angular sobre su eje. Primero se explorarán los fundamentos de la PWM y luego una aplicación con el MG90S. Se utilizará Python junto con algunas bibliotecas incorporadas que facilitan la comprensión de la modulación por ancho de pulso. Por último, se presentará una aplicación a la rotación de una cámara sobre un plano 2-D, que tiene aplicaciones en seguridad, fotografía o aplicaciones de aprendizaje automático en el procesamiento de imágenes.
donde τ es la duración del pulso, T es el periodo de la señal PWM (20ms aquí), n es la suma de Fourier iterable, y t es el paso de tiempo. A continuación se muestra la señal PWM implementada utilizando la representación de Fourier:

