Codigo para mover un servomotor con arduino
servomotor código arduino 90 grados
Un servomotor es un pequeño dispositivo que tiene un eje de salida. Este eje puede ser colocado en posiciones angulares específicas enviando al servo una señal codificada. Mientras la señal codificada exista en la línea de entrada, el servo mantendrá la posición angular del eje. Si la señal codificada cambia, la posición angular del eje cambia. En la práctica, los servos se utilizan en los aviones de radiocontrol para posicionar superficies de control como los elevadores y los timones. También se utilizan en coches de radiocontrol, marionetas y, por supuesto, robots.
Los servos son muy útiles en robótica. Los motores son pequeños, tienen circuitos de control incorporados y son extremadamente potentes para su tamaño. Un servo estándar, como el Futaba S-148, tiene un par de 42 onzas/pulgadas, que es muy potente para su tamaño. También consume una potencia proporcional a la carga mecánica. Un servo con poca carga, por lo tanto, no consume mucha energía.
Las tripas de un servomotor se muestran en la siguiente imagen. Puedes ver el circuito de control, el motor, un conjunto de engranajes y la carcasa. También puedes ver los 3 cables que se conectan al mundo exterior. Uno es para la alimentación (+5 voltios), tierra, y el cable blanco es el cable de control.
cómo controlar el servomotor con arduino
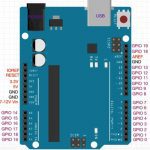
Algunos de los pines de Arduino pueden ser programados para generar una señal PWM. Podemos controlar el servomotor conectando el pin de señal del servomotor a un pin de Arduino, y programando para generar PWM en el pin de Arduino.
Gracias a la librería Arduino Servo, controlar el servomotor es muy fácil. Incluso NO necesitamos saber cómo funciona el servomotor. Tampoco necesitamos saber cómo generar la señal PWM. Solo necesitamos aprender a usar la librería.
En aras de la simplicidad, el diagrama de cableado anterior se utiliza para las pruebas o propósitos de aprendizaje, y para el servomotor de par pequeño. En la práctica, recomendamos encarecidamente utilizar la fuente de alimentación externa para el servomotor. El siguiente diagrama de cableado muestra cómo conectar el servomotor a una fuente de alimentación externa.
Como podemos ver en el diagrama anterior, el pin VCC del servomotor NO se conecta al pin de 5V de Arduino. Se conecta al pin positivo de una fuente de alimentación adicional. El pin negativo de la fuente de alimentación extra se conecta al pin GND de Arduino.
código del servomotor continuo en arduino
Hemos construido algunos proyectos que han utilizado motores para hacer que las cosas se muevan y en el camino hemos visto algunos de los diferentes tipos de motores que podemos controlar con nuestros proyectos de Arduino y Raspberry Pi.
Hemos trabajado con motores básicos de corriente continua unas cuantas veces. Construimos un par de proyectos de robótica que se basan en motores de CC y también echamos un vistazo extenso al controlador de puente H que se utiliza comúnmente para regular la velocidad y la dirección de un motor de CC con un microcontrolador o microordenador.
Otro tipo de motor con el que hemos trabajado es el motor paso a paso. Este tipo de motor tiene su eje impulsado en pasos discretos, lo que permite un control muy preciso. Son muy utilizados en diseños de impresoras y robótica.
Un servomotor es un motor de baja velocidad y alto par que viene en una variedad de tamaños. A diferencia de los motores de corriente continua y de los motores paso a paso, el servomotor no suele girar 360 grados. En cambio, está limitado a un rango de 180, 270 o 90 grados.
Una señal de control es enviada al servo para posicionar el eje en el ángulo deseado. Esta disposición con una sola señal hace que los servos sean sencillos de utilizar en diseños de radio y control remoto, así como con microcontroladores.
servoteca de arduino
Los servomotores son un tipo particular de motor, que gracias a sus características y facilidad de uso, suelen utilizarse en los primeros ejemplos de control de motores en placas como Arduino o Raspberry. El modelismo hace mucho uso de este tipo de motores y hay muchos servomotores de bajo coste disponibles en el mercado, también útiles para fines educativos. En este artículo veremos primero qué son los servomotores, cómo utilizarlos y finalmente cómo programar Arduino para utilizarlos con algunos ejemplos sencillos.
Un servomotor tiene la particularidad de ajustar la clavija de transmisión de la rotación en ángulos exactos comprendidos en un determinado rango, que suelen ir de 0 a 180º, aunque también hay modelos que cubren rangos mayores.
Disponer de un motor que ajuste la rotación de un eje para que asuma un ángulo preciso deseado es útil en muchas aplicaciones. Basta con pensar en un modelado sencillo, en el que queremos utilizar este motor para ajustar la rotación de un timón para un barco o un avión, o la de un volante para hacer girar las ruedas en un ángulo determinado.