Codigo para robot laberinto arduino
resolver un laberinto con autoaprendizaje
En mi escuela tenemos un proyecto en el que tenemos que hacer un robot que pueda resolver un laberinto en 3D utilizando un robot controlado por arduino que utiliza sensores ultrasónicos para determinar cómo girar. El robot no puede estar preprogramado y debe funcionar en todos los laberintos simples con giros de 90d.
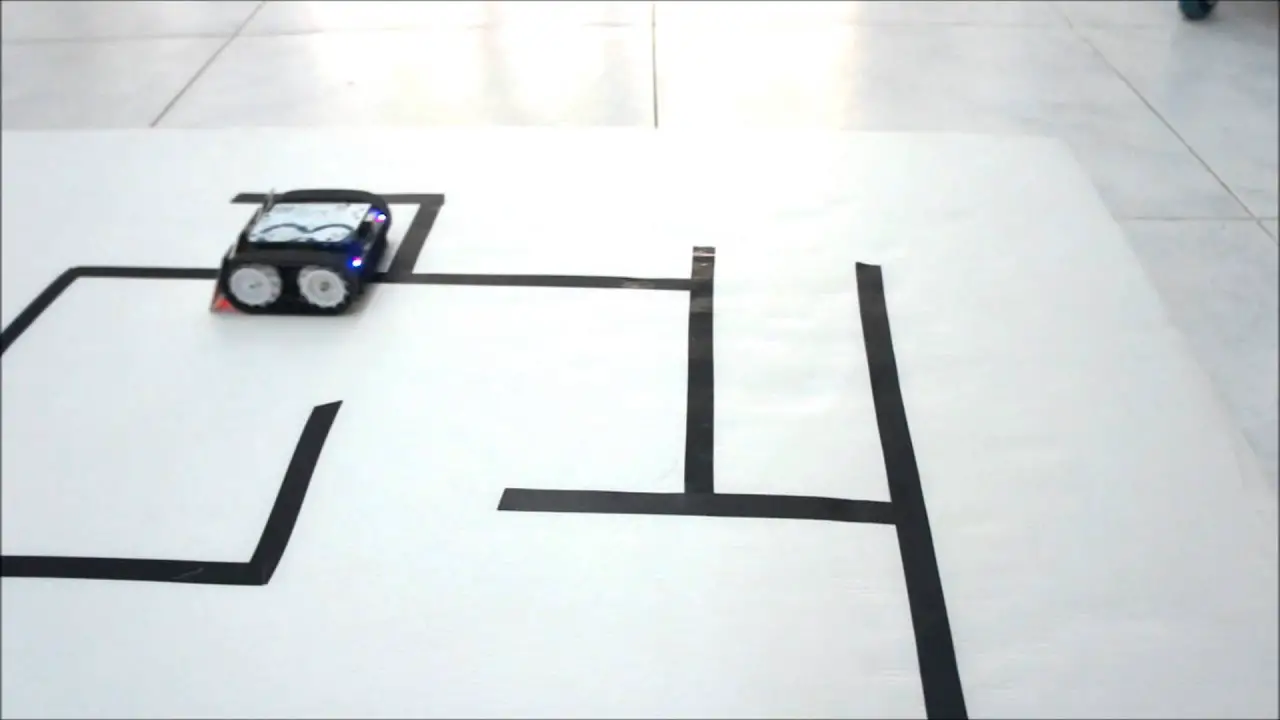
He descubierto la mayor parte del código creo, sin embargo mi problema es que cuando el robot tiene que girar. Como la cantidad y la dirección en la que el robot debe girar está determinada por los sensores de distancia, la distancia a las esquinas aumenta, haciéndola más larga de lo que se requiere para girar. Esto hace que el robot quiera volver a girar hacia la esquina y entonces se queda atascado en un bucle de giros dentro y fuera de la esquina (ver imagen adjunta).
El robot se compone de tres sensores ultrasónicos, delantero, derecho e izquierdo. El robot tiene orugas que le permiten girar sobre la marcha. El arduino es un arduino mega, por lo que es rápido en la actualización y medición de los valores (a menos que el tiempo necesario para la medición de la distancia sea largo).
Lo que hace es romper el ciclo a 1Hz (cambiar como quieras). Cuando se utilizan ultrasonidos (como en las imágenes), siempre es una buena idea reducir los intervalos entre cada lectura, ya que permite que el ruido residual se calme. Imagina el pitido del sonar de un submarino.
robot solucionador de laberintos con sensor ir
Este kit te permite construir tu propio robot solucionador de laberintos. Viene completo con todo lo que necesitas, incluyendo todos los motores y sensores electrónicos. Sólo tienes que construir el robot (requiere soldadura), conectar una pila PP3 (no incluida) y ya está listo para salir a explorar. El kit también incluye un libro con instrucciones detalladas sobre cómo construir, poner en marcha, diseñar un laberinto e incluso programar…
Este kit te permite construir tu propio robot para resolver laberintos. Viene completo con todo lo que necesitas, incluyendo todos los motores y sensores electrónicos. Sólo tienes que construir el robot (requiere soldadura), conectar una pila PP3 (no incluida) y ya está listo para salir a explorar. El kit también incluye un libro con instrucciones detalladas sobre cómo construir, poner en marcha, diseñar un laberinto e incluso programar el Maze Runner
El Maze Runner también está diseñado para ser compatible con el IDE de Arduino, lo que significa que, con sólo añadir un cable de programación, puedes reprogramar el Maze Runner para que siga tus propios comandos. Esto hace que el Maze Runner no sea sólo un robot para resolver laberintos, sino un vehículo robótico de uso general. Para que la reprogramación sea lo más fácil posible, se puede descargar una biblioteca compatible con Arduino desde nuestro foro de soporte, lo que permite acceder al hardware del Maze Runner.
código del sensor ultrasónico del laberinto descargar
En mi escuela tenemos un proyecto en el que tenemos que hacer un robot que pueda resolver un laberinto en 3D utilizando un robot controlado por arduino que utiliza sensores ultrasónicos para determinar cómo girar. El robot no puede estar preprogramado y debe funcionar en todos los laberintos simples con giros de 90d.
He descubierto la mayor parte del código creo, sin embargo mi problema es que cuando el robot tiene que girar. Como la cantidad y la dirección en la que el robot debe girar está determinada por los sensores de distancia, la distancia a las esquinas aumenta, haciéndola más larga de lo que se requiere para girar. Esto hace que el robot quiera volver a girar hacia la esquina y entonces se queda atascado en un bucle de giros dentro y fuera de la esquina (ver imagen adjunta).
El robot se compone de tres sensores ultrasónicos, delantero, derecho e izquierdo. El robot tiene orugas que le permiten girar sobre la marcha. El arduino es un arduino mega, por lo que es rápido en la actualización y medición de los valores (a menos que el tiempo necesario para la medición de la distancia sea largo).
Lo que hace es romper el ciclo a 1Hz (cambiar como quieras). Cuando se utilizan ultrasonidos (como en las imágenes), siempre es una buena idea reducir los intervalos entre cada lectura, ya que permite que el ruido residual se calme. Imagina el pitido del sonar de un submarino.
solucionador automático de laberintos
Con la adición de los 2 nuevos, sus posibles salidas son:Para almacenar los valores de cada sensor se crea una variable array para los 5 sensores digitales originales: int LFSensor[5]={0, 0, 0, 0, 0};
Disponer de 5 sensores, como se vio en el proyecto del Robot de Línea Seguidora, permite generar una «variable de error» que ayudará a controlar la posición del robot sobre la línea. Además, se utilizará una variable llamada «modo» para definir si el robot está siguiendo una línea, sobre una línea continua, una intersección o ninguna línea. Esta variable «modo» se utilizará también con los sensores «Far LEFT/RIGHT». Para la representación, consideremos que los sensores del extremo izquierdo y derecho tienen 3 estados posibles: Para las salidas digitales , serán los habituales 0, 1 y también introduciremos la X:Así, implementando la lógica anterior en la función:void readLFSsensors()
devolverá las variables «modo» y «error» que se utilizarán en la lógica del programa. Es importante probar la lógica de los sensores antes de seguir con el proyecto. La siguiente función está incluida en el código y puede ser usada para propósitos de prueba:void testSensorLogic(void)

