Como conectar l293d a arduino
Arduino motor de corriente continua hacia adelante y hacia atrás l293d
En este artículo, estamos publicando un proyecto que explica diferentes aspectos de la interfaz Arduino-Motor de engranajes. El motorreductor es un motor de corriente continua especialmente diseñado cuyo conjunto de engranajes ayuda a aumentar el par y a reducir la velocidad. En comparación con un motor de corriente continua normal, las revoluciones máximas que puede producir un motor de engranajes son menores. Pero tienen la ventaja de que, utilizando la combinación correcta de engranajes, sus rpm pueden reducirse a cualquier valor deseable. A diferencia del servomotor, el motorreductor también puede girar de forma continua. El sentido del motorreductor puede invertirse simplemente invirtiendo la polaridad de la conexión de la batería. Y la velocidad del motor puede controlarse cambiando el nivel de tensión a través de él. Un controlador de motor IC llamado L293D se utiliza aquí para la interfaz del motor de engranajes con Arduino. El L293D consiste en dos puentes H diseñados con un circuito de 4 transistores que nos ayuda a invertir la dirección de la rotación y a controlar la velocidad del motor de corriente continua.
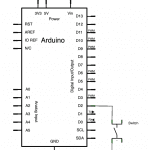
En el circuito se utiliza un Arduino UNO como plataforma. El motor de engranajes está conectado al Arduino UNO a través del controlador de motor IC L293D. Como se mencionó anteriormente, un IC controlador de motor consiste en dos circuitos de puente H que se pueden utilizar para controlar dos motores simultáneamente. Un L293D tiene 4 pines de entrada, 4 pines de salida, 2 pines de habilitación, Vss, Vcc y GND. Vcc es la tensión que necesita para su funcionamiento interno. El L293D no utilizará esta tensión para accionar el motor. Para el accionamiento de los motores tiene una disposición separada para proporcionar la alimentación del motor Vss.
Puente h l293d
El primer argumento representa el número de motores en el escudo y el segundo representa la frecuencia de control de la velocidad del motor. El segundo argumento puede ser MOTOR12_2KHZ, MOTOR12_8KHZ, MOTOR12_8KHZ, y MOTOR12_8KHZ para los motores número 1 y 2, y puede ser MOTOR12_8KHZ, MOTOR12_8KHZ, y MOTOR12_8KHZ para los motores número 3 y 4. Y si se deja sin marcar, será 1KHZ por defecto.motor.setSpeed(200);
Definiendo un objeto motor Stepper. El primer argumento es la resolución del paso del motor. (por ejemplo, si tu motor tiene una precisión de 7.5 grados/paso, significa que la resolución de pasos del motor es. El segundo argumento es el número del motor Stepper conectado al shield.void setup() {
Control de la velocidad de un motor de corriente continua mediante arduino y el módulo l293d
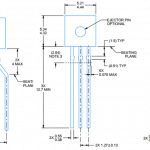
El L293D es un CI de controlador de motor de 16 pines que puede controlar un conjunto de dos motores de CC simultáneamente en cualquier dirección. El L293D está diseñado para proporcionar corrientes de accionamiento bidireccionales de hasta 600 mA (por canal) a tensiones de entre 4,5 V y 36 V (¡en el pin 8!). Puedes utilizarlo para controlar pequeños motores de corriente continua – motores de juguete. A veces puede ser extremadamente caliente.
arduino dc motorarduino L293DDC motorordc motor arduinodc motor connectionhow to use dc motor in arduinoHow to Use the L293D Motor Driver – Arduino Tutoriall293dL293D arduinoL293D connectionL293D connection with arduino
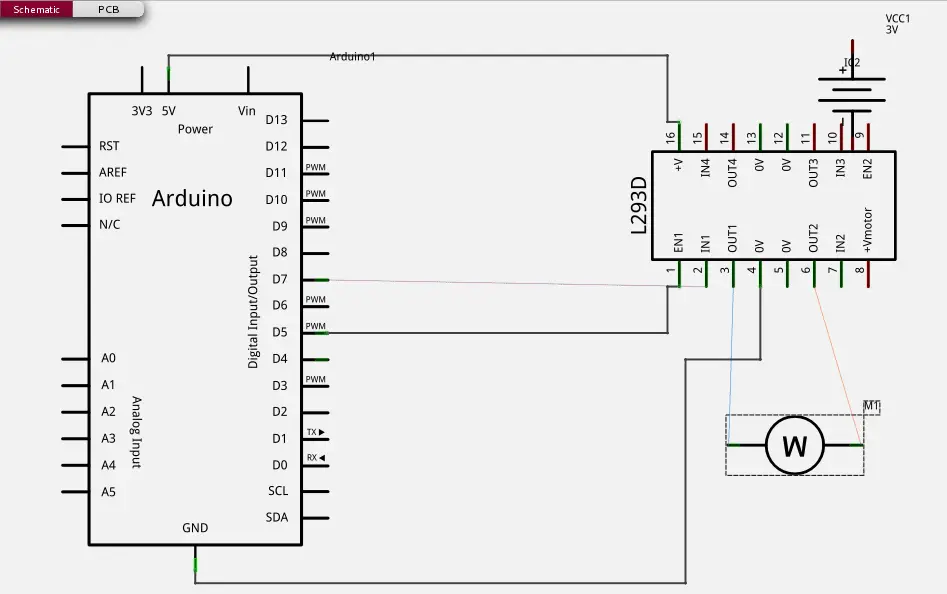
Diagrama del circuito del controlador del motor l293d
Conectar un driver de motor L293D con Arduino es una de las cosas más fáciles. Sin embargo, es crucial considerar hacerlo de la manera correcta. Nuestros consejos de bricolaje se centran en proporcionarle la información correcta para hacer las cosas bien y evitar arrepentimientos más adelante.
En este post/tutorial, veremos cómo puedes conectar un controlador de motor L293D con Arduino. En primer lugar, una cosa que debes tener en cuenta es que el L293D tiene alrededor de 16 pines. Por lo tanto, le ayuda a controlar hasta dos motores de corriente continua al mismo tiempo en su dirección preferida.
El objetivo principal del accionamiento del motor es tomar señales de baja corriente y convertirlas en señales de mayor corriente para accionar el motor. El L293D es un típico driver de motor que es capaz de accionar dos motores DC simultáneamente con mucha facilidad.
Los circuitos integrados de controladores de motor sólo se utilizan en la robótica autónoma. Es esencial tener en cuenta que muchos microprocesadores utilizan voltajes bajos y sólo requieren una corriente baja para funcionar, en comparación con los motores que requieren corrientes y voltajes relativamente más altos. Esta es una de las principales razones por las que es importante utilizar un CI de controlador de motor.