Pines pwm arduino mega
Lilypad arduino 328 main boar…
La modulación de ancho de pulso o PWM es una técnica común utilizada para variar el ancho de los pulsos en un tren de pulsos. La PWM tiene muchas aplicaciones como el control de servos y reguladores de velocidad, la limitación de la potencia efectiva de los motores y los LEDs.
La función analogWrite() escribe un valor analógico (onda PWM) en un pin. Se puede utilizar para encender un LED con un brillo variable o conducir un motor a varias velocidades. Después de una llamada a la función analogWrite(), el pin generará una onda cuadrada constante del ciclo de trabajo especificado hasta la siguiente llamada a analogWrite() o una llamada a digitalRead() o digitalWrite() en el mismo pin. La frecuencia de la señal PWM en la mayoría de los pines es de aproximadamente 490 Hz. En el Uno y placas similares, los pines 5 y 6 tienen una frecuencia de aproximadamente 980 Hz. Los pines 3 y 11 en la Leonardo también funcionan a 980 Hz.
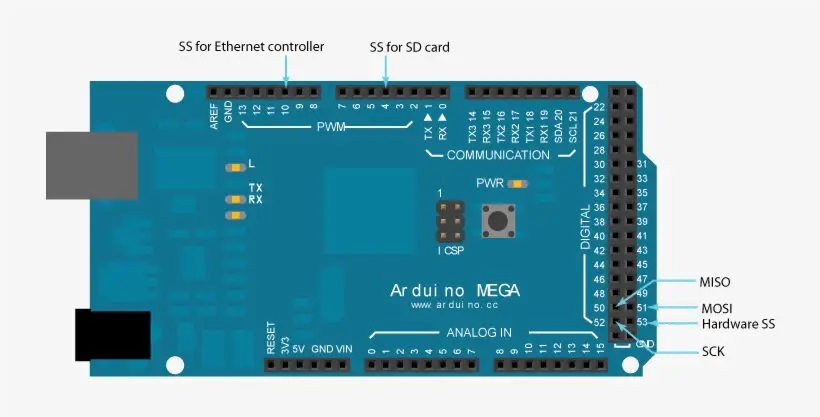
En la mayoría de las placas Arduino (las que tienen ATmega168 o ATmega328), esta función funciona en los pines 3, 5, 6, 9, 10 y 11. En el Arduino Mega, funciona en los pines 2 – 13 y 44 – 46. Las placas Arduino más antiguas con un ATmega8 sólo soportan analogWrite() en los pines 9, 10 y 11.
Retroalimentación
Escribe un valor analógico (onda PWM) en un pin. Se puede utilizar para encender un LED con diferentes brillos o para accionar un motor a varias velocidades. Después de una llamada a analogWrite(), el pin generará una onda rectangular constante del ciclo de trabajo especificado hasta la siguiente llamada a analogWrite() (o una llamada a digitalRead() o digitalWrite()) en el mismo pin.
Las salidas PWM generadas en los pines 5 y 6 tendrán ciclos de trabajo más altos de lo esperado. Esto se debe a las interacciones con las funciones millis() y delay(), que comparten el mismo temporizador interno utilizado para generar esas salidas PWM. Esto se notará sobre todo en los ajustes de ciclos de trabajo bajos (por ejemplo, 0 – 10) y puede resultar en un valor de 0 que no apague completamente la salida en los pines 5 y 6.
Pines pwm de arduino
El valor PWM de 8 bits que se establece cuando se llama a la función analogWrite: analogWrite(myPWMpin, 128); La salida de una onda cuadrada se compara con el valor de un contador de 8 bits. Cuando el contador es menor que el valor PWM, el pin emite un HIGH; cuando el contador es mayor que el valor PWM, el pin emite un LOW. En el ejemplo anterior, se genera una onda cuadrada porque el pin está ALTO desde la cuenta 0 hasta la 127, y BAJO desde la cuenta 128 hasta la 255, por lo que está ALTO durante el mismo tiempo que está BAJO.
Se deduce lógicamente que la frecuencia de la señal PWM está determinada por la velocidad del contador. Asumiendo que estás usando un UNO, el reloj de este contador es igual al reloj del sistema dividido por un valor de preescalado. El preescalador es un valor de 3 bits almacenado en los tres bits menos significativos del registro Temporizador/Contador: CS02, CS01 y CS00.
Hay tres registros de temporizador/contador de este tipo: TCCR0B, TCCR1B y TCCR2B. Como hay tres preescaladores diferentes, los seis pines PWM se dividen en tres pares, cada par con su propio preescalador. Por ejemplo, los pines de Arduino 6 y 5 están ambos controlados por TCCR0B, por lo que puedes configurar los pines de Arduino 6 y 5 para que emitan una señal PWM a una frecuencia. Los pines 9 y 10 de Arduino están controlados por TCCR1B, por lo que se pueden ajustar a una frecuencia diferente a la de los pines 6 y 5. Los pines 11 y 3 de Arduino son controlados por TCCR2B, por lo que pueden ser ajustados a una tercera frecuencia. Pero no puedes establecer diferentes frecuencias para los pines que son controlados por el mismo preescalador (por ejemplo, los pines 6 y 5 deben estar a la misma frecuencia).
Pinout de arduino mega
Escribe un valor analógico (onda PWM) en un pin. Se puede utilizar para encender un LED con diferentes brillos o para accionar un motor a varias velocidades. Después de una llamada a analogWrite(), el pin generará una onda rectangular constante del ciclo de trabajo especificado hasta la siguiente llamada a analogWrite() (o una llamada a digitalRead() o digitalWrite()) en el mismo pin.
Las salidas PWM generadas en los pines 5 y 6 tendrán ciclos de trabajo más altos de lo esperado. Esto se debe a las interacciones con las funciones millis() y delay(), que comparten el mismo temporizador interno utilizado para generar esas salidas PWM. Esto se notará sobre todo en los ajustes de ciclos de trabajo bajos (por ejemplo, 0 – 10) y puede resultar en un valor de 0 que no apague completamente la salida en los pines 5 y 6.