Codigo arduino para brazo robotico
brazo robótico hexbug vex
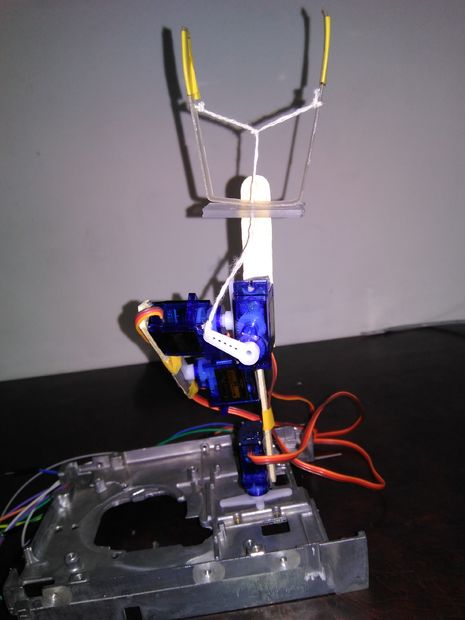
En este tutorial, vamos a diseñar un brazo robótico basado en Arduino Uno a partir de algunos cartones y servomotores. Todo el proceso de construcción se ha explicado en detalle a continuación. En este proyecto Arduino Uno está programado para controlar los servomotores que sirven como articulaciones del brazo robótico. Esta configuración también se ve como una grúa robótica o podemos convertirla en una grúa haciendo algunos ajustes fáciles. Este proyecto será útil para los principiantes que quieren aprender a desarrollar un robot simple de bajo costo o simplemente quieren aprender a trabajar con Arduino y servomotores.
Este brazo robótico Arduino puede ser controlado por cuatro potenciómetros conectados a él, cada potenciómetro se utiliza para controlar cada servo. Puedes mover estos servos girando los potenciómetros para coger algún objeto, con un poco de práctica puedes coger y mover fácilmente el objeto de un lugar a otro. Hemos utilizado servos de bajo par aquí, pero puedes utilizar servos más potentes para recoger objetos pesados. Todo el proceso ha sido bien demostrado en el video al final. También revisa nuestros otros Proyectos de Robótica aquí.
brazo robótico – controlado por arduino
El kit de brazo robótico para Arduino está diseñado para que los aficionados masivos aprendan a controlar el brazo robótico. Con la MCU Arduino UNO de código abierto y una placa de expansión de servos, el brazo robótico es fácil de usar y está lleno de diversión. Puedes controlar sus cuatro ejes mediante los 4 botones del potenciómetro, así como hacer que se muevan en tu ordenador.
Todos los pedidos se procesan dentro de las 24 horas siguientes a su realización. Normalmente, podemos enviar los pedidos al día siguiente. Los pedidos del fin de semana se envían el lunes siguiente. Recibirá un correo electrónico de confirmación de envío de nuestro sistema cuando la información de envío haya sido cargada.
¡Muy fácil! Acceda a su cuenta a través de la tienda online, compruebe el estado de cumplimiento de su pedido reciente. Si el pedido se ha realizado, haga clic en la información del pedido y podrá encontrar la información de seguimiento aquí.
* Tiempo de entrega – Estas son las estimaciones de entrega proporcionadas por nuestros socios de envío y se aplican desde el punto de envío, no desde el punto de venta. Una vez que su paquete sale de nuestro almacén, no podemos controlar ningún retraso después de ese momento.
lynxmotion al5d 4dof robotic ar…
ResponderUpvoteVeo que has utilizado tanto un arduino como un ssc 32. El problema es que no se puede hacer un seguimiento de los resultados de la investigación. Me preguntaba por qué usaste ambas placas simultáneamente y si había algún beneficio en hacer eso.0srishti b
en IntroducciónReplyUpvoteSir puede u por favor dar las especificaciones sobre el tamaño del brazo como cada longitud de las secciones, la anchura y la altura y cuando su circular su radio y todo. por favor, responda lo antes posible. su urgente. gracias
sobre la IntroducciónRepuestaUpvoteEl que he descrito arriba tiene una función fija. Sin embargo, puedes añadir un joystick o un ratón a la configuración y programarlo de manera que puedas controlar el brazo del robot usando el ratón/joystick 0yhtomitsy
on IntroducciónReplyUpvoteMuchas gracias señor.Estaba trabajando en Arduino desde hace poco tiempo y su tutorial me ha proporcionado un impulso para aprender muchas cosas.Muchas gracias.Estoy deseando ser adicto a sus tutoriales.0agupta82
en IntroducciónReplyUpvoteSin duda tu trabajo es genial hombre…pero…si pudiéramos controlarlo nosotros mismos sería mejor,en lugar de que sólo repita sus movimientos…Estoy en ello..seguramente lo publicaré aquí..:)
mini robot industrial ar…
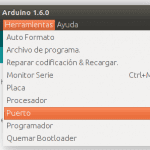
Cada tipo de brazo tiene una serie de parámetros diferentes y es importante que encuentres el adecuado para el tuyo. Lo que te sugiero es que inicialmente los potenciómetros (pots) se queden en su punto medio y el mapeo de las salidas PWM se establezca en los valores por defecto: Max = 255, Min = 0 y Mid = 126 («#defines» arriba). Luego, comience a variar los potes (uno por uno) y siga en el Monitor Serial (o LCD) cuales deben ser los valores mínimos y máximos donde el brazo funciona correctamente. Esos serán los valores finales que se utilizarán para los ajustes (cambiar mis valores originales en ArmDefine.h.Para «grabar» los conjuntos de coordenadas (o pasos) que el robot debe reproducir, utilizaré arrays de datos:
Tenga en cuenta que no estoy manteniendo la posición «almacenada» y al final del programa «robot», el índice vuelve a cero y el robot esperará a la grabación de una nueva secuencia (el programa se pierde). Otra posibilidad es guardar estas matrices de datos en la EEPROM del Arduino, por ejemplo. Haciendo esto, el programa se ejecutaría de nuevo o incluso podrías tener más de un programa almacenado.Añadir consejoHacer una preguntaComentarDescargarPaso 6: La lógica del programaEl bloque principal («Loop») es realmente muy simple:void loop ()