Conexion de un servomotor
Conexión del servomotor
Explicación: El control de los servos no es una tarea fácil, pero por suerte para nosotros, el IDE de Arduino ya contiene una biblioteca muy agradable llamada Servo. Incluye comandos sencillos para que puedas instruir rápidamente al servo para que gire en un ángulo determinado.Si vas a usar estos comandos, tienes que decirle al IDE de Arduino que estás usando la librería con este comando:#include <Servo. h>Lo siguiente que hacemos es declarar el pin de Arduino al que se conecta el pin de control del servomotor.int servoPin = 9;La siguiente línea crea un objeto servo.Servo servo;En realidad puedes definir hasta ocho servos de esta manera, por ejemplo, si tuviéramos dos servos, entonces podríamos escribir algo así:Servo servo1;
Controlador de servomotor
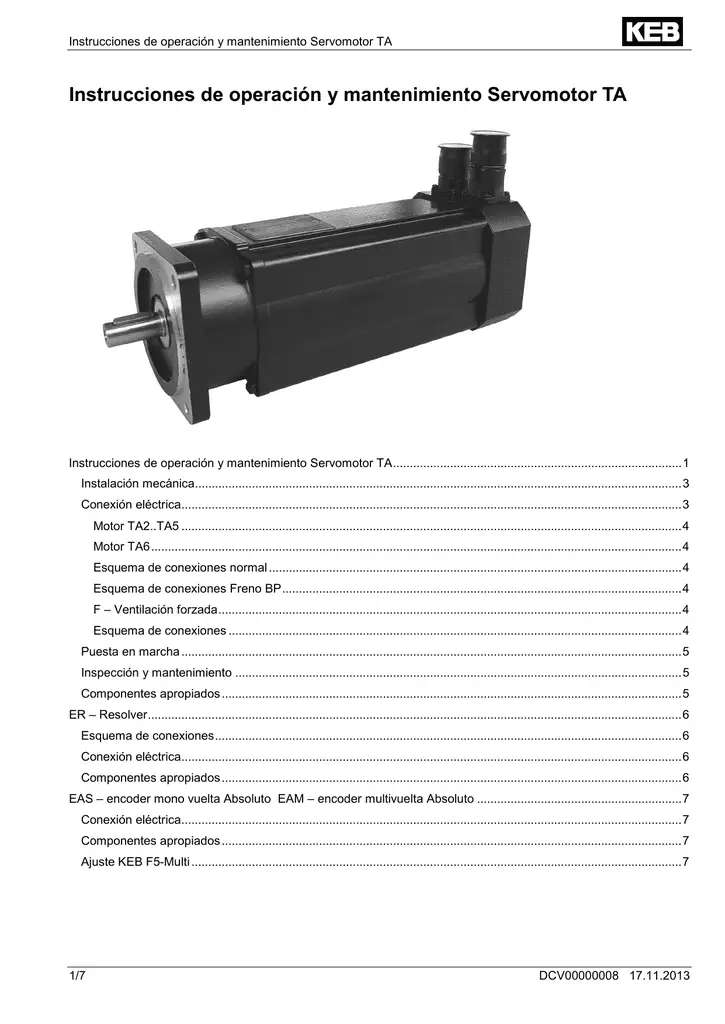
Un servomotor de imán permanente tiene 3 fases y tierra. Nuestros servomotores estándar también tienen un dispositivo de retroalimentación, como un codificador incremental (con sensores Hall), un codificador absoluto o un resolver. El cable de realimentación puede ser parte o estar separado del cable de alimentación del motor.
Si el motor está conectado a un servoaccionamiento, apague el accionamiento. Siga las recomendaciones del fabricante sobre el tiempo que debe transcurrir para que el accionamiento disipe la tensión. Desconecte los cables de fase del motor y el cable de tierra del variador. (Tome nota de las conexiones, para volver a conectarlas después de la prueba.) Estos son cables de mayor calibre que los cables de retroalimentación. No es necesario desconectar los cables de retroalimentación del variador.
Utilice un ohmímetro para comprobar la resistencia entre las 3 fases del motor (1-2, 2-3, 1-3). Diferentes fabricantes utilizan diferentes designaciones para sus fases de motor (U-V-W, X-Y-Z, 1-2-3, A-B-C) pero para esta prueba es arbitrario. Todos ellos deben medir la misma resistencia entre las fases del motor. El valor típico es menos de 20 ohmios.
Si hay un cortocircuito (cerca de 0 resistencia) entre las fases del motor o un cortocircuito a tierra, el motor tendrá que ser reemplazado o reparado. Esta condición causaría un fallo en el servo drive. Puedes comprobar el servo drive y si es un drive digital más nuevo, tendrá un registro de errores. Los accionamientos más antiguos pueden tener un LED de fallo que puede indicar un fallo del motor, un fallo de sobrecorriente/puente /I2T u otro problema.
Conexión del servomotor con el arduino
Este artículo necesita citas adicionales para su verificación. Por favor, ayude a mejorar este artículo añadiendo citas de fuentes fiables. El material sin fuente puede ser cuestionado y eliminado.Buscar fuentes: «Servomotor» – noticias – periódicos – libros – scholar – JSTOR (marzo de 2016) (Aprende cómo y cuándo eliminar este mensaje de la plantilla)
Servomotor industrialEl cilindro gris/verde es el motor de corriente continua con escobillas. La sección negra de la parte inferior contiene el engranaje reductor planetario, y el objeto negro de la parte superior del motor es el codificador rotatorio óptico para la retroalimentación de posición. Este es el actuador de dirección de un gran vehículo robot.
Un servomotor es un actuador rotativo o lineal que permite un control preciso de la posición angular o lineal, la velocidad y la aceleración[1]. También requiere un controlador relativamente sofisticado, a menudo un módulo dedicado diseñado específicamente para su uso con servomotores.
Un servomotor es un servomecanismo de bucle cerrado que utiliza la retroalimentación de posición para controlar su movimiento y posición final. La entrada a su control es una señal (analógica o digital) que representa la posición ordenada para el eje de salida.
Código arduino del servomotor en sentido horario y antihorario
Un Servo Motor se define como un dispositivo automático que utiliza una rutina de corrección de errores para corregir su movimiento. El término servo puede aplicarse a sistemas distintos de un servomotor; sistemas que utilizan un mecanismo de retroalimentación como un codificador u otro dispositivo de retroalimentación para controlar los parámetros de movimiento. Normalmente, cuando se utiliza el término servomotor se aplica a un «servomotor», pero también se utiliza como término de control general, lo que significa que se utiliza un bucle de retroalimentación para posicionar un elemento.
Un servomecanismo puede o no utilizar un servomotor. Por ejemplo, un horno doméstico es un servomecanismo controlado por un termostato. Una vez que se alcanza la temperatura establecida, hay una retroalimentación que le indica que se apague, lo que lo convierte en un «servo» por naturaleza. El término «servo» describe más una función o tarea que una línea de productos específica. En esta guía, hablaremos específicamente de los servomotores.
Un servomotor puede ser un motor de CC, CA o CC sin escobillas, combinado con un sensor de posición; en la mayoría de los casos, un codificador digital. Un servomotor suele ser el motor seleccionado cuando es esencial que haya un alto grado de confianza en que el servomotor y el sistema de accionamiento seguirán de cerca lo que se les pide. El coste de un sistema de servomotor suele ser mayor que el de un sistema de motor paso a paso, debido al sensor de retroalimentación del servomotor y a la electrónica de procesamiento.