Controlar motor brushless con arduino
control de motor sin escobillas esc con arduino
Sobre: Soy un entusiasta de Arduino y de la electrónica, hago varios proyectos de Arduino desde pequeños mini proyectos hasta proyectos de automatización del hogar, incluyendo IOT.
La mayoría de los proyectos que se realizan en el mundo son de carácter técnico, por lo que es muy importante que el usuario tenga una idea clara de cómo se puede llevar a cabo el proyecto. Si es posible, ¿podría indicarme dónde conseguir referencias para codificar un sistema de este tipo? 0PuneethS12Pregunta
RespuestaUpvotehi compañero, tengo la misma situación pero con un pequeño problema, entre el ESC y el motor sin escobillas he añadido un interruptor, el problema es que uno, el motor intenta arrancar y temblar un poco, sin interruptor funciona bien, dejé el potenciómetro en la posición media porque necesito una velocidad media.sabes por qué tengo este problema? gracias antonio0ARYANS67
ReplyUpvoteHey there , I’m arian , I must to say that it’s code isn’t working , because it must be like below : #include Y en el void loop()esc.write(val);cambio los códigos para que funcione . Ahora , puedo manejar mi motor brushless y controlar la velocidad con el volumen .Si quieres ver , te puedo enviar un video de los códigos y el trabajo.Saludos , buena suerte0JuanPabloA
associated 29185 reedy sc…
Hay dos tipos de motores de corriente continua sin escobillas: con sensor y sin sensor. El motor BLDC con sensores tiene incorporados 3 sensores de efecto hall, estos sensores detectan la posición del rotor del motor BLDC. Controlar un motor BLDC con sensores es fácil ya que conocemos la posición del rotor como se hizo en el proyecto de abajo:
Cuando el motor BLDC gira, cada devanado (3 devanados) genera BEMF que se opone a la tensión principal. Las 3 señales BEMF generadas están desfasadas 120°, que es lo mismo que las señales del sensor de efecto hall. La figura siguiente muestra la relación entre las señales de efecto Hall y las señales BEMF:
Como se muestra en la figura anterior, las señales BEMF no están sincronizadas con las señales del sensor de efecto Hall (desplazamiento de fase de 30°). En cada secuencia de energización, se energizan dos devanados (uno conectado al positivo y el otro al negativo) y el tercer devanado se deja abierto (flotante). El devanado flotante se utiliza para detectar el cruce de cero, por lo tanto, la combinación de los 3 puntos de cruce de cero se utilizan para generar la secuencia de energización. En total tenemos 6 eventos:
esquema del motor sin escobillas
El motor de corriente continua sin escobillas (BLDC) es un motor trifásico que se presenta en dos tipos principales: con sensor y sin sensor. La técnica de control del motor BLDC sin sensores se basa en la BEMF (fuerza electromotriz de retorno) producida en los devanados del estator.
En los dos proyectos anteriores, utilicé el comparador analógico interno del Atmega328P (microcontrolador Arduino UNO) para detectar los eventos de cruce por cero de las 3 fases, pero no es buena idea (puede dar malos resultados) utilizar este comparador y el módulo ADC porque comparten el mismo multiplexor. Por lo tanto, he utilizado un chip externo que es LM339 quad comparator IC.
En este proyecto necesitamos 3 comparadores para comparar el BEMF de cada fase con respecto al punto natural virtual porque necesitamos detectar el cruce por cero de cada fase, aquí utilicé el chip comparador LM339 quad. El punto virtual se conecta a la entrada inversora ( – ) de los tres comparadores como se muestra en el diagrama del circuito anterior. El BEMF A se conecta al pin no inversor ( + ) del comparador número 1, el BEMF B se conecta al terminal positivo del comparador 2 y el BEMF C se conecta al terminal positivo del comparador 3. El comparador 4 no se utiliza y sus terminales de entrada deben estar conectados a tierra.
hobbywing quicrun 10bl120…
¡Controlar el motor de corriente continua sin escobillas usando Arduino es un proceso fácil vamos a estudiar formas de controlar el motor de corriente continua sin escobillas. pero es necesario saber que el Arduino proporciona sólo 5 voltios y 40mA por lo que el motor funcionará pero no de manera eficiente! Así que para resolver este problema utilizamos componentes adicionales llamados por Controlador Electrónico de Velocidad (ESC). Así que vamos a construir proyectos basados en ESC vamos a construir motor de corriente continua sin escobillas conexión directa con el potenciómetro y la conexión con el sensor ultrasónico.
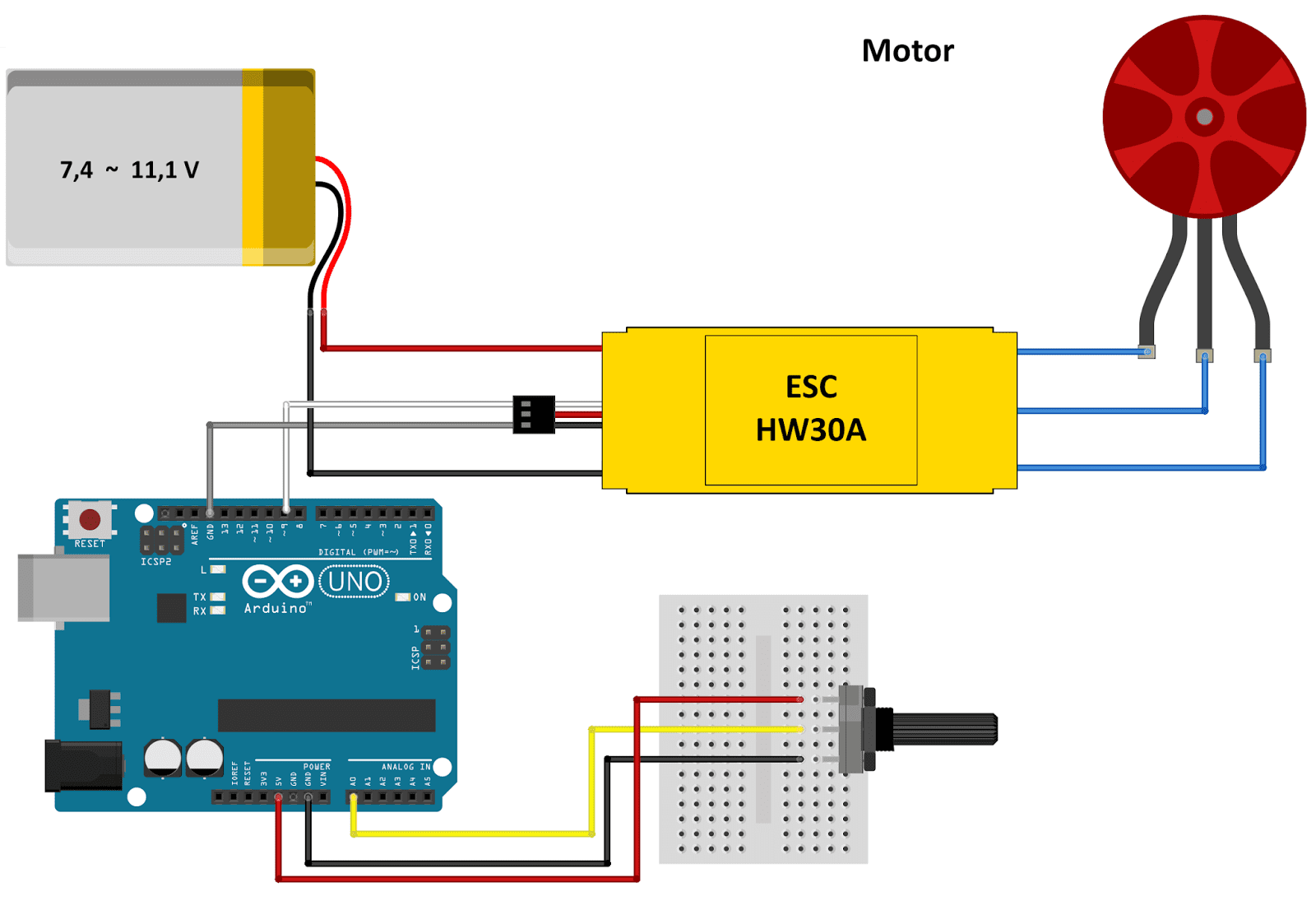
En primer lugar, vamos a aprender a conectar el motor directamente con la placa Arduino y el ESC para controlar utilizando la ventana del monitor de serie, en este proyecto necesitamos estos componentes como se muestra en la siguiente tabla:
Conectaremos el motor Brushless DC con la pieza del ESC de forma que los electrodos deben ser correctos (si están mal el motor girará en sentido contrario) y conectaremos la batería Lipo a los electrodos correctos.
Introduciremos el ESC en el pin D11 PWM y a continuación introduciremos las lecturas del monitor serie, entonces el valor 0 generará un 0% de PWM y el valor 180 generará un 100% de ciclo de trabajo. Cualquier valor por encima de 180 no hará nada. Así que utilizamos el mapa del valor de 0-180 mediante el uso de la función de mapa, las conexiones de Brushless DC Motor y ESC con Arduino UNO R3 será como sigue:

