Motor a pasos 4 hilos arduino
Motor paso a paso arduino
En este artículo aprenderás a controlar un motor paso a paso con el driver de motor L298N. ¡Esta placa de controlador se utiliza generalmente para controlar los motores de corriente continua, pero también es una alternativa barata para controlar los motores de paso! Puede controlar tanto la velocidad como la dirección de giro de la mayoría de los motores paso a paso como un NEMA 17.
He incluido un diagrama de cableado y muchos códigos de ejemplo. En el primer ejemplo veremos la librería Arduino Stepper.h. Recomiendo encarecidamente a echar un vistazo a los códigos de ejemplo para la biblioteca AccelStepper al final de este tutorial. Esta biblioteca es bastante fácil de usar y puede mejorar en gran medida el rendimiento de su hardware.
La placa de controladores de motor L298N está construida alrededor del controlador de doble puente completo L298, fabricado por STMicroelectronics. Con este controlador de motor puede controlar motores de corriente continua, motores paso a paso, relés y solenoides. Viene con dos canales separados, llamados A y B, que puede utilizar para conducir 2 motores de corriente continua, o 1 motor paso a paso cuando se combina.
Una cosa que es muy importante recordar es que el L298 no tiene una manera fácil de establecer un límite de corriente a diferencia de otros controladores de motor paso a paso como el A4988 (tutorial). Esto significa que el consumo de corriente depende de la relación entre la inductancia y la resistencia (L/R) del motor paso a paso que se conecta a él. Si el motor consume demasiada corriente, puedes dañar el driver y el motor se calentará.
Circuito controlador de motor paso a paso de 4 hilos
Un motor paso a paso es un tipo de motor de corriente continua que funciona en pasos discretos y se utiliza en todas partes, desde una cámara de vigilancia hasta sofisticados robots y máquinas. Los motores paso a paso proporcionan un control preciso, y se pueden diferenciar en base al par, los pasos por revolución y la tensión de entrada. En nuestro proyecto anterior, controlamos el motor paso a paso 28-BYJ48 utilizando Arduino. El 28-BYJ48 tiene un par relativamente menor que los otros motores paso a paso como NEMA 14, NEMA17.
En este tutorial, vamos a controlar el motor paso a paso NEMA17 utilizando Arduino Uno y el módulo de controlador paso a paso A4988. El motor paso a paso Nema17 tiene un mayor par y un mayor voltaje de funcionamiento que el 28-BYJ48. En este caso, también se adjuntará un potenciómetro para controlar la dirección del motor paso a paso.
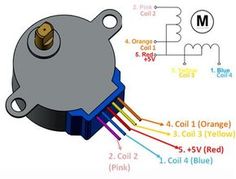
El funcionamiento del Nema17 es similar al de los motores paso a paso normales. El motor paso a paso NEMA 17 tiene una placa frontal de 1,7 x 1,7 pulgadas, y suele tener más par que las variantes más pequeñas, como el NEMA 14. Este motor tiene seis hilos conductores, y la tensión nominal es de 12 voltios. Puede funcionar con una tensión inferior, pero el par se reducirá. Los motores paso a paso no giran sino que dan pasos, y el motor NEMA17 tiene un ángulo de paso de 1,8 grados, lo que significa que cubre 1,8 grados en cada paso. El diagrama de cableado para NEMA17 se da a continuación.
Pinout del motor paso a paso de 4 hilos
El A4988 es un driver de microstepping para el control de motores paso a paso bipolares que lleva incorporado un traductor para facilitar su funcionamiento. Esto significa que podemos controlar el motor paso a paso con sólo 2 pines de nuestro controlador, o uno para controlar la dirección de rotación y el otro para controlar los pasos.
El Driver proporciona cinco resoluciones de paso diferentes: paso completo, paso de eje, cuarto de paso, ocho pasos y dieciseisavo de paso. Además, cuenta con un potenciómetro para ajustar la salida de corriente, una desconexión térmica por sobretemperatura y una protección de corriente de cruce.
Ahora vamos a ver de cerca el pinout del driver y conectarlo con el motor paso a paso y el controlador. Así que vamos a empezar con los 2 pines en el lado derecho del botón para alimentar el conductor, los pines VDD y tierra que necesitamos para conectarlos a una fuente de alimentación de 3 a 5,5 V y en nuestro caso que será nuestro controlador, la placa Arduino que proporcionará 5 V. Los siguientes 4 pines son para conectar el motor. Los pines 1A y 1B se conectarán a una bobina del motor y los pines 2A y 2B a la otra bobina del motor. Para alimentar el motor utilizamos los siguientes 2 pines, Tierra y VMOT que necesitamos conectarlos a la fuente de alimentación de 8 a 35 V y también necesitamos utilizar un condensador de desacoplamiento de al menos 47 µF para proteger la placa del driver de los picos de tensión.
Controlador de motor paso a paso de 4 hilos
Porque me olvidé de comprar uno, y no puedo hacerme con uno hasta dentro de un par de días. Utilizo los MOSFETs como interruptores rápidos: 4 pines de Arduino controlan 4 transistores MOSFET. Y esta es precisamente la fuente de confusión: En la página web de arduino, el stepper del circuito de muestra tiene 4 cables y está conectado directamente a un CI controlador (un LMxxx), y el controlador está conectado a Arduino. Como no tengo un driver a mano, necesito convertir el circuito para que funcione con 4 transistores en su lugar. Pero, ¿cuál debe ser el cableado? Si tuviera 5 cables lo habría hecho como este esquema.
Los bipolares, sin embargo, requieren un par de puentes H para que funcionen correctamente. No sólo tienes que encender y apagar las bobinas en el orden correcto, pero tienes que cambiarlos a la polaridad correcta en el momento adecuado.
Normalmente no recomiendo instructables como algunas de las cosas en allí son francamente peligroso, pero hay un ejemplo en allí de la conducción de un motor paso a paso bipolar de un Arduino: http://www.instructables.com/id/Bi-Polar-Stepper-Motor-with-L293D-and-Arduino/

