Programa en arduino para controlar un motor a pasos
Código de prueba del motor paso a paso de arduino
Explicación del código: El sketch comienza definiendo los pines de Arduino a los que se conectan los pines STEP y DIR del A4988. También definimos stepsPerRevolution. Ajústalo para que coincida con las especificaciones de tu motor paso a paso.const int dirPin = 2;
}Explicación del código:Comenzamos incluyendo la biblioteca AccelStepper recién instalada.#include <AccelStepper.h>Definimos los pines de Arduino a los que se conectan los pines STEP y DIR del A4988. También establecemos motorInterfaceType a 1. (1 significa un driver de stepper externo con pines Step y Direction)// Definimos las conexiones de los pines
Motor paso a paso bipolar doble con…
Explicación del código: El sketch comienza con la inclusión de la librería Arduino Stepper. La librería stepper viene empaquetada con el IDE de Arduino y se encarga de secuenciar los pulsos que enviaremos a nuestro motor stepper.//Incluir la librería Arduino Stepper
#include <Stepper.h>Después de incluir la librería definimos una variable llamada stepsPerRevolution. Como su nombre indica es el número de pasos por revolución que tiene nuestro motor. En este caso es 200, es decir, 1,8 grados por paso.// Número de pasos por rotación de salida
const int stepsPerRevolution = 200;A continuación, creamos una instancia de la librería stepper. Toma los pasos por revolución del motor y las conexiones de los pines de Arduino como parámetro.// Creamos una instancia de la librería Stepper
}En la sección de bucle del código, simplemente llamamos a la función step() que hace girar el motor un número específico de pasos a una velocidad determinada por la función setSpeed(). Pasando un número negativo a esta función se invierte el sentido de giro del motor.void loop()
Motor paso a paso de 90 grados de rotación código arduino
El A4988 es un driver de microstepping para el control de motores paso a paso bipolares que lleva incorporado un traductor para facilitar su funcionamiento. Esto significa que podemos controlar el motor paso a paso con sólo 2 pines de nuestro controlador, o uno para controlar la dirección de rotación y el otro para controlar los pasos.
El Driver proporciona cinco resoluciones de paso diferentes: paso completo, paso de eje, cuarto de paso, ocho pasos y dieciseisavo de paso. Además, cuenta con un potenciómetro para ajustar la salida de corriente, una desconexión térmica por sobretemperatura y una protección de corriente de cruce.
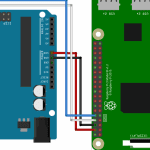
Ahora vamos a ver de cerca el pinout del driver y conectarlo con el motor paso a paso y el controlador. Así que vamos a empezar con los 2 pines en el lado derecho del botón para alimentar el conductor, los pines VDD y tierra que necesitamos para conectarlos a una fuente de alimentación de 3 a 5,5 V y en nuestro caso que será nuestro controlador, la placa Arduino que proporcionará 5 V. Los siguientes 4 pines son para conectar el motor. Los pines 1A y 1B se conectarán a una bobina del motor y los pines 2A y 2B a la otra bobina del motor. Para alimentar el motor utilizamos los siguientes 2 pines, Tierra y VMOT que necesitamos conectarlos a la fuente de alimentación de 8 a 35 V y también necesitamos utilizar un condensador de desacoplamiento de al menos 47 µF para proteger la placa del driver de los picos de tensión.
Control de velocidad y dirección del motor paso a paso de arduino
Cómo funciona el código: El sketch comienza con la definición de los pines de paso y dirección. Los conecté a los pines 3 y 2 de Arduino.La declaración #define se utiliza para dar un nombre a un valor constante. El compilador reemplazará cualquier referencia a esta constante con el valor definido cuando el programa sea compilado. Así que dondequiera que mencione dirPin, el compilador lo reemplazará con el valor 2 cuando el programa sea compilado.También definí una constante stepsPerRevolution. Debido a que configuré el controlador en modo de paso completo, lo establecí en 200 pasos por revolución. Cambia este valor si tu configuración es diferente.// Define las conexiones del motor paso a paso y los pasos por revolución:
En la sección loop() del código, dejamos que el motor gire una revolución lentamente en la dirección CW y una revolución rápidamente en la dirección CCW. Luego, dejamos que el motor gire 5 revoluciones en cada dirección con una velocidad alta. Entonces, ¿cómo se controla la velocidad, la dirección de giro y el número de revoluciones? // Establece el sentido de giro en el sentido de las agujas del reloj:
#include <AccelStepper.h>El siguiente paso es definir las conexiones del A4988 al Arduino y el tipo de interfaz del motor. El tipo de interfaz del motor debe establecerse en 1 cuando se utiliza un controlador de paso y dirección. La declaración #define se utiliza para dar un nombre a un valor constante. El compilador reemplazará cualquier referencia a esta constante con el valor definido cuando el programa sea compilado. Así que dondequiera que mencione dirPin, el compilador lo reemplazará con el valor 2 cuando el programa sea compilado.// Defina las conexiones del motor paso a paso y el tipo de interfaz del motor. El tipo de interfaz del motor debe ser fijado a 1 cuando se utiliza un driver: