Tacometro con arduino y lcd
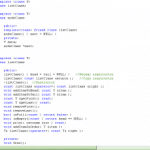
Código del tacómetro arduino
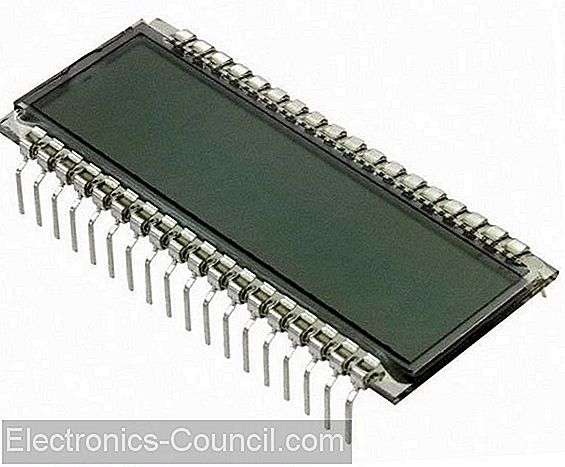
En este tutorial, aprenda a interconectar el módulo de sensor IR con Arduino o ESP8266 o ESP32 para construir un tacómetro preciso que mida las RPM de un objeto en rotación y muestre los valores medidos en un módulo de pantalla LCD de 16×2. Este tacómetro barato basado en infrarrojos es más preciso que otros tacómetros basados en láser que vienen en el rango de 50 dólares en el mercado.
El tacómetro no es más que un instrumento de medición que se utiliza para medir elementos giratorios, para determinar el número de vueltas que hace en su propio eje en cierta cantidad de tiempo, que depende de su velocidad.
La unidad de medida del tacómetro son las revoluciones por minuto (RPM), ya que hay que entender que revoluciones significa vueltas, entonces sería el número de vueltas que da el elemento, por cada minuto.
La palabra tacómetro tiene un origen en el vocabulario griego, el prefijo «Tacko» significa velocidad o alta velocidad y por su parte, el sufijo «Metron» se traduce como medida. Por ello, afirmo que el tacómetro es un instrumento que mide la velocidad.
Arduino tacómetro cable de bujía
ReplyUpvoteEn el diagrama del circuito, el pin de salida de la unidad de sensor IR está conectado al pin D2 de Arduino. Pero, ¿en qué parte del código de Arduino se declara el pin de entrada? ¿Soy el único que no es capaz de hacerlo funcionar?
RespuestaUpvotek1200sHay errores por todas partes; la resistencia de 68k no debería estar ahí, la entrada D2 debería ir a la salida del op-amp y no al LED, y las asignaciones de pines para el Nano están mal, estoy trabajando en ello. attachInterrupt(0,isr,RISING);el cero en lo anterior se refiere al pin D2, que en realidad en un nano es el Pin5… por lo que debe leer…attachInterrupt(5,isr,RISING)Puedo ver que va a trabajar, pero no está escrito demasiado bien :(0mb_lenggries
¡ReplyUpvoteitt también funciona muy bien con un sensor Hall-pcb barato de eBay! Este es mi primer proyecto con un Arduino (Pro Mini) – y se siente bien;-) Gracias!!! siguiente pregunta rápida: Mirando el sketch, no veo dónde/cómo se define el pin D2 como entrada (necesito saberlo para posteriores modificaciones y jugar con un codificador rotatorio). Estaría muy bien si usted podría ayudar con una respuesta.0man_thas_cool
Tacómetro digital con arduino pdf
Sobre el voltaje de entrada, en las especificaciones de la placa se dice «Por defecto miden de tierra a 5 voltios, aunque es posible cambiar el extremo superior de su rango usando el pin AREF y la función analogReference()», eso pensaba, aunque después de leerlo de nuevo, no dice cuál sería el rango superior entonces.
Esa especificación solo dice «max 45V» por lo que no nos dice lo que necesitamos saber. Suponen que vas a utilizar su fuente de alimentación. Puedes hacer algunas pruebas, pero apuesto a que tiene más de 2V de caída y no funcionará con 5V o menos.
Yo pondría un variador de nivel o limitador de voltaje en la señal. CREO que el mayor voltaje de IO permite 5V IO con núcleo de 3,3V, pero no lo recuerdo exactamente. Me sorprendería que pudieras poner 7V en el pin sin riesgo.
En primer lugar, la toma de la línea de combustible conlleva un riesgo de incendio. No debes apilar un montón de adaptadores para que las conexiones funcionen. Las líneas de combustible están presurizadas. Dependiendo de la marca y el modelo pueden ser de media a alta presión. Los raíles de los inyectores diesel pueden ser de muy alta presión.
Arduino tacómetro analógico
Tengo una pregunta idiota. La primera vez, puse el cable Vcc al pin equivocado (al pin de tierra del led), y encendí el transmisor. ¿He estropeado el receptor? Porque el receptor envía el 1 para cualquier cambio (encender/apagar el transmisor ) después de la corrección, lo que vi en esta página(gracias )
C:\Program Files (x86)\Arduino\arduino-builder -dump-prefs -logger=machine -hardware C:\Program Files (x86)\Arduino\hardware -tools C:\Program Files (x86)\Arduino\tools-builder -tools C:\Program Files (x86)\Arduino\hardware\tools\avr -built-in-libraries C: \Archivos de programa (x86)-Arduino -bibliotecas -bibliotecas C:-Users\Ralph\Documents\Arduino -fqbn=arduino:avr:nano:cpu=atmega328 -ide-version=10611 -build-path C:-Users\Ralph\AppData\Local\Temp\build1048c6d5a27b5c792c2453e8f50cd505. tmp -warnings=all -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.avr-gcc.path=C:\gram Files (x86)\Arduino\hardware\tools\avr -prefs=runtime. tools.avrdude.path=C:\NArchivos de programa (x86)\NArduino\hardware\tools\avr -verbose C:\NUsers\Ralph\Documents\NArduino\NOPT_Tachometer\NOPT_Tachometer.ino