Control motor a pasos arduino
Controlador de motor paso a paso tb6600
Explicación del código: El sketch comienza definiendo los pines de Arduino a los que se conectan los pines STEP y DIR del A4988. También definimos stepsPerRevolution. Ajústalo para que coincida con las especificaciones de tu motor paso a paso.const int dirPin = 2;
}Explicación del código:Comenzamos incluyendo la biblioteca AccelStepper recién instalada.#include <AccelStepper.h>Definimos los pines de Arduino a los que se conectan los pines STEP y DIR del A4988. También establecemos motorInterfaceType a 1. (1 significa un driver de stepper externo con pines Step y Direction)// Definimos las conexiones de los pines
Kit de motor paso a paso arduino
Un motor paso a paso es un motor síncrono sin escobillas, que divide una rotación completa en un número de pasos. A diferencia de un motor de corriente continua sin escobillas, que gira continuamente cuando se le aplica una tensión de corriente continua fija, un motor paso a paso gira en ángulos de paso discretos.
Por ello, los motores paso a paso se fabrican con pasos por revolución de 12, 24, 72, 144, 180 y 200, lo que da lugar a ángulos de paso de 30, 15, 5, 2,5, 2 y 1,8 grados por paso. El motor paso a paso puede controlarse con o sin retroalimentación.
Imagina un motor en un avión RC. El motor gira muy rápido en una u otra dirección. Puedes variar la velocidad con la cantidad de potencia que le das al motor, pero no puedes decirle a la hélice que se detenga en una posición específica.
Ahora imagina una impresora. En una impresora hay muchas piezas móviles, incluidos los motores. Uno de estos motores actúa como alimentador de papel, haciendo girar los rodillos que mueven el trozo de papel mientras se imprime la tinta en él. Este motor tiene que ser capaz de mover el papel una distancia exacta para poder imprimir la siguiente línea de texto o la siguiente línea de una imagen.
Hiletgo tb6560 3a cnc rout…
Los motores paso a paso están tomando cada vez más su posición en el mundo de la electrónica. Desde una cámara de vigilancia normal hasta una complicada máquina CNC/Robot, estos motores paso a paso se utilizan en todas partes como actuadores, ya que proporcionan un control preciso. Un motor paso a paso es un motor síncrono sin escobillas que completa una rotación completa en un número de pasos. En este tutorial de motores paso a paso de Arduino aprenderemos sobre el motor paso a paso más comúnmente disponible 28-BYJ48 y cómo interconectarlo con Arduino utilizando el módulo de motor paso a paso ULN2003.
Bien, a diferencia de un motor normal de corriente continua este tiene cinco cables de todos los colores que salen de él y ¿por qué es así? Para entender esto primero debemos saber cómo funciona un motor paso a paso y cuál es su especialidad. En primer lugar, los motores paso a paso no giran, sino que dan pasos, por lo que también se conocen como motores paso a paso. Es decir, se mueven sólo un paso a la vez. Estos motores tienen una secuencia de bobinas presentes en ellos y estas bobinas tienen que ser energizadas de una manera particular para hacer que el motor gire. Cuando cada bobina se energiza, el motor da un paso y una secuencia de energización hará que el motor dé pasos continuos, haciéndolo girar. Echemos un vistazo a las bobinas presentes en el interior del motor para saber exactamente de dónde vienen estos cables.
Proyectos de motores paso a paso con arduino
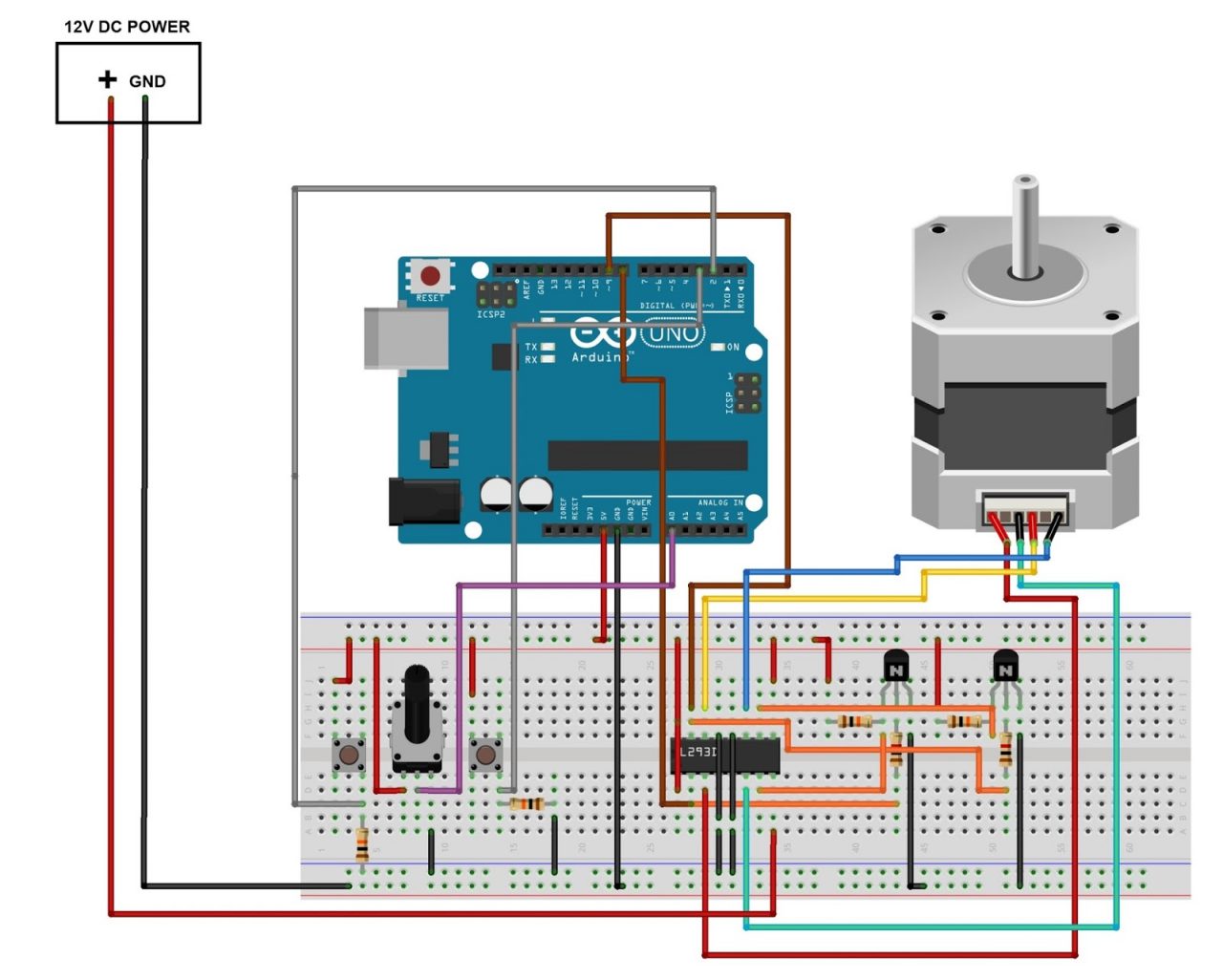
En el último proyecto de Arduino, hice un simple controlador de motor que controla la velocidad y la dirección de rotación del motor paso a paso bipolar de CD-ROM. Ahora voy a mostrar cómo hacer lo mismo con un motor paso a paso uinpolar.
Básicamente hay dos tipos de motores paso a paso: bipolar y unipolar. El motor paso a paso bipolar es un motor sin escobillas de dos fases que tiene dos bobinas (devanados), este motor tiene 4 hilos (2 hilos para cada bobina).
El modo de medio paso es una combinación de los dos modos de paso completo (monofásico y bifásico). Este modo aumenta la precisión dividiendo cada paso por 2. requiere una potencia intermedia entre los modos monofásico y bifásico, el par también es intermedio.
Como se muestra en la figura anterior hay 4 bobinas: A, B, C y D. Estas bobinas tienen un punto común nombrado en la figura Alimentación del motor que se conecta al terminal positivo de la fuente de alimentación. Los otros terminales de la bobina están conectados a un controlador de motor.
En el modo de control de paso completo siempre se energizan dos bobinas al mismo tiempo de acuerdo con la siguiente tabla donde 1 significa que la bobina está energizada y 0 significa que no está energizada (se muestran ambas direcciones):