Mover motor con arduino
Controlador de motor arduino
Hemos construido algunos proyectos que han utilizado motores para hacer que las cosas se muevan y en el camino hemos visto algunos de los diferentes tipos de motores que podemos controlar con nuestros proyectos Arduino y Raspberry Pi.
Hemos trabajado con motores básicos de corriente continua unas cuantas veces. Construimos un par de proyectos de robótica que se basan en motores de CC y también echamos un vistazo extenso al controlador de puente H que se utiliza comúnmente para regular la velocidad y la dirección de un motor de CC con un microcontrolador o microordenador.
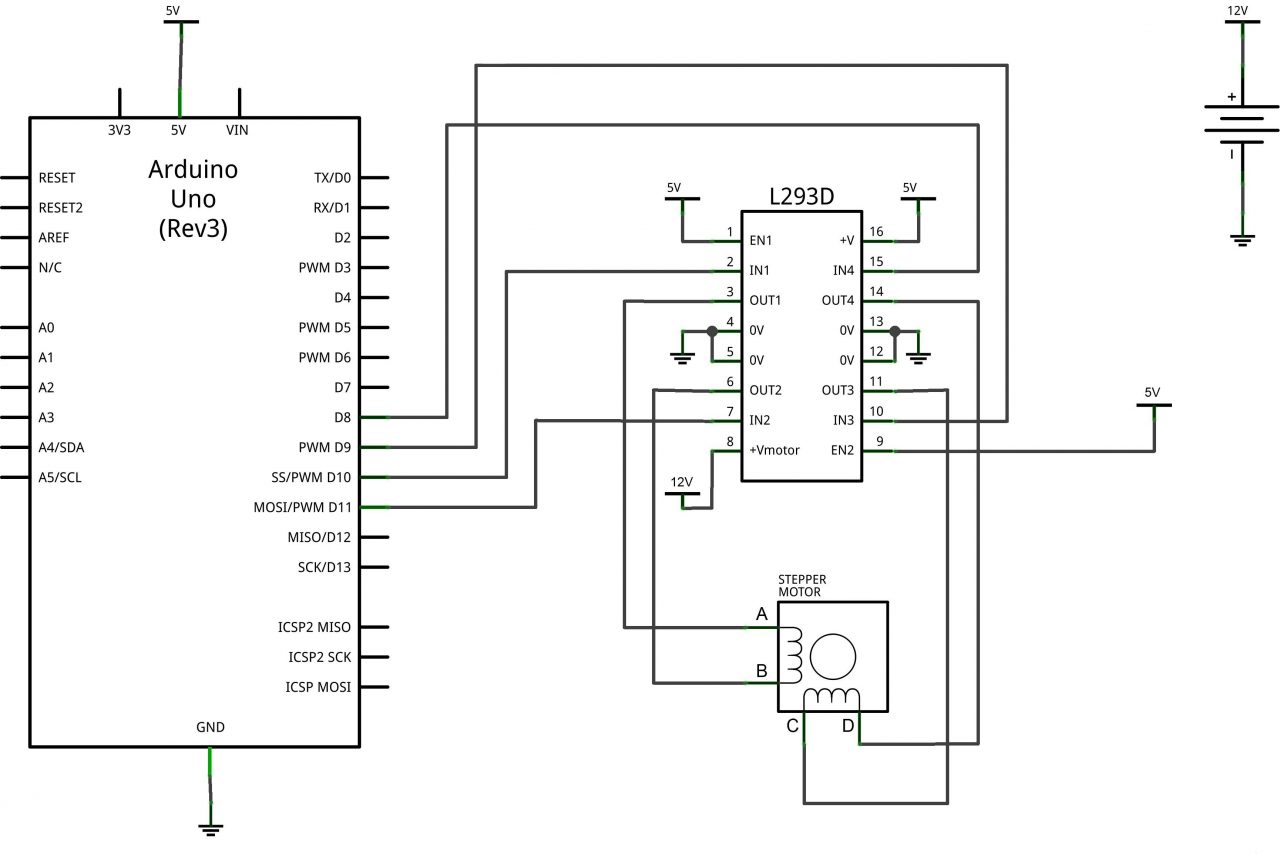
Otro tipo de motor con el que hemos trabajado es el motor paso a paso. Este tipo de motor tiene su eje impulsado en pasos discretos, lo que permite un control muy preciso. Son muy utilizados en diseños de impresoras y robótica.
Un servomotor es un motor de baja velocidad y alto par que viene en una variedad de tamaños. A diferencia de los motores de corriente continua y de los motores paso a paso, el servomotor no suele girar 360 grados. En cambio, está limitado a un rango de 180, 270 o 90 grados.
Una señal de control es enviada al servo para posicionar el eje en el ángulo deseado. Esta disposición con una sola señal hace que los servos sean sencillos de utilizar en diseños de radio y control remoto, así como con microcontroladores.
Como controlar el motor de corriente continua con el código de arduino
for (pos = 0; pos <= 180; pos += 3) { // va de 0 grados a 180 grados // en pasos de 1 grado myservo.write(pos); // dile al servo que vaya a la posición en la variable ‘pos’ delay(5); // espera 15ms para que el servo alcance la posición } for (pos = 180; pos >= 0; pos -= 3) { // va de 180 grados a 0 grados
for (pos = 0; pos <= 180; pos += 3) { // va de 0 grados a 180 grados // en pasos de 1 grado myservo.write(pos); // le dice al servo que vaya a la posición en la variable ‘pos’ delay(5); // espera 15ms para que el servo alcance la posición } for (pos = 180; pos >= 0; pos -= 3) { // va de 180 grados a 0 grados
Cómo cambiar la velocidad del motor de corriente continua arduino
En este tutorial de Arduino aprenderemos a controlar motores de corriente continua usando Arduino. Veremos algunas técnicas básicas para controlar motores de corriente continua y haremos dos ejemplos a través de los cuales aprenderemos a controlar motores de corriente continua utilizando el driver de motor L298N y la placa Arduino.
PWM, o modulación por ancho de pulso es una técnica que nos permite ajustar el valor medio de la tensión que va al dispositivo electrónico mediante el encendido y apagado de la energía a un ritmo rápido. La tensión media depende del ciclo de trabajo, o de la cantidad de tiempo que la señal está encendida frente a la cantidad de tiempo que la señal está apagada en un solo período de tiempo.
Así que, dependiendo del tamaño del motor, podemos simplemente conectar una salida PWM de Arduino a la base del transistor o a la puerta de un MOSFET y controlar la velocidad del motor controlando la salida PWM. La señal PWM de Arduino de baja potencia enciende y apaga la puerta del MOSFET a través de la cual se acciona el motor de alta potencia.
Por otro lado, para controlar el sentido de giro, sólo necesitamos invertir la dirección del flujo de corriente a través del motor, y el método más común de hacerlo es utilizando un Puente H. Un circuito H-Bridge contiene cuatro elementos de conmutación, transistores o MOSFETs, con el motor en el centro formando una configuración en forma de H. Activando dos conmutadores particulares al mismo tiempo podemos cambiar la dirección del flujo de corriente, cambiando así el sentido de rotación del motor.
Código de control de motores arduino
Quiero crear un programa Arduino para un sistema que tiene tres botones y un motor paso a paso. Si se pulsa el botón 1, el motor paso a paso debe ir, por ejemplo, 50 pasos hacia adelante. Si se pulsa el botón 2, el motor paso a paso debe ir 50 pasos hacia atrás. Si se pulsa el botón 3, el motor paso a paso debe ir 50 pasos hacia adelante y luego 50 pasos hacia atrás.
Utilicé la librería de stepper de Arduino y escribí el siguiente código. Las funciones Forward(), Backward() y Continuous() implementan las acciones a realizar para cada botón. Cada función mueve el motor paso a paso y registra la acción en una salida serie.
Desafortunadamente, al final del primer bucle stepCount es exactamente 50. Y 50 no es estrictamente más pequeño (<) que 50. Podrías usar un menor o igual (<=) en su lugar, pero como el bucle no decrementa el contador, podrías simplificar la condición a:
También necesitas eliminar la redefinición de stepCount en este bloque del bucle, ya que crea una nueva variable local que oculta la definición inicial (es decir, un nombre, dos variables, eso es muy confuso).

