Robot seguidor de luz arduino
2:30robot rastreador de luz: proyecto bluebot #2science buddiesyoutube – 16 sep 2015
¿Has visto alguna vez a un gato perseguir un puntero láser o el haz de una linterna? Y si pudieras hacer que un robot hiciera eso? En este proyecto, construirás un robot que puede conducirse automáticamente hacia una fuente de luz brillante. El robot utiliza un sencillo circuito electrónico para seguir la luz, por lo que no es necesario programar el ordenador. También puedes realizar otros tres proyectos de robótica con el mismo kit de piezas, por lo que es una buena forma de iniciarse en la robótica antes de pasar a proyectos más avanzados.
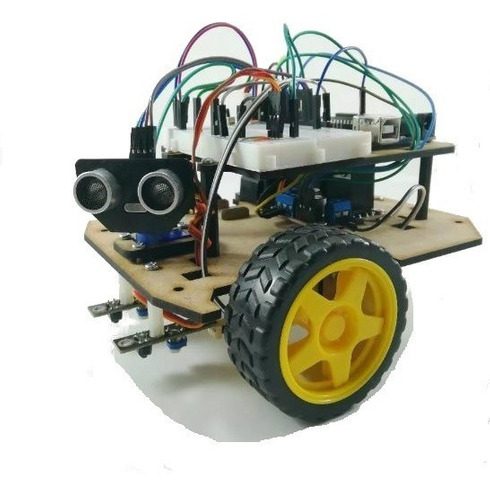
¿Alguna vez has querido construir tu propio robot, pero no sabías por dónde empezar? En este proyecto, construirás un robot divertido y relativamente sencillo, sin necesidad de programación informática. El robot de este proyecto utiliza sensores de luz, que son componentes electrónicos que pueden detectar la luz; ayudarán al robot a seguir el haz de una linterna, igual que un gato utiliza sus ojos para seguir un puntero láser. La figura 1 y el vídeo muestran el aspecto del robot y su funcionamiento.
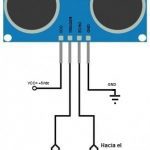
¿Puedes imaginar cómo dirigirías el robot, basándote en el vídeo? La figura 2 muestra un diagrama de cómo reacciona el robot ante una linterna. Una linterna puede servir para «guiar» al robot dirigiéndolo hacia delante, hacia la izquierda o hacia la derecha.
0:51bipedio robótico controlado porarduino – proyectos de prueba y desinnovaciónyoutube – 19 jun 2020
Hoy en día, al realizar cualquier tipo de seguimiento óptico, nuestra mente salta inmediatamente hacia soluciones sofisticadas. Nos vienen a la mente Raspberry Pis, cámaras de alta gama y cadenas de herramientas de aprendizaje automático. Por supuesto, si tus objetivos son más sencillos, no necesitas complicar el asunto. PHIL es un robot de seguimiento de la luz que se conforma con hacerlo a la antigua usanza.
PHIL consta de un Arduino Uno que ejecuta una plataforma de movimiento de doble servo, proporcionando a la cabeza del sensor funcionalidad de giro e inclinación. El cabezal del sensor consiste en una cubierta de sección cruciforme impresa en 3D que monta cuatro resistencias dependientes de la luz en secciones individuales. La cubierta ayuda a bloquear la luz a los sensores fuera de ángulo, lo que proporciona una mayor diferencia entre los que están expuestos a la luz directamente y los que están en el lado oscuro. Esto hace que la señal de diferencia sea más fuerte, por lo que cuando el Arduino lee los sensores, es mucho más claro hacia dónde debe apuntar el cabezal del sensor PHIL para seguir la luz.
El constructor, [Sean O’Donovan], señala que PHIL se construyó sin ningún propósito práctico en mente, y es simplemente un proyecto genial. Estamos de acuerdo, y es importante tener en cuenta que los conocimientos adquiridos en un proyecto como éste serán siempre útiles en el futuro. Estas técnicas pueden ser muy útiles para seguir el sol, por ejemplo. Vídeo tras la pausa.
informe del proyecto de robot de luz
Euglena es un género de organismos unicelulares que viven en masas de agua dulce y salada. La mayoría de las especies de Euglena tienen cloroplastos que se utilizan para la fotosíntesis, al igual que las plantas. Además, la mayoría contiene un único fotorreceptor y una mancha ocular, lo que permite a la Euglena seguir y moverse hacia las fuentes de luz. Para saber más sobre la Euglena, consulte esta página de Wikipedia. También puedes ver cientos de Euglenas nadando en este vídeo.
Para emular el comportamiento de la Euglena, vamos a hacer un robot que busque la luz y se mueva hacia zonas de luz brillante. El SIK v4.0 sólo viene con una fotocélula (sensor de luz), lo que significa que tendremos que hacer que nuestro «organismo» robótico gire a la izquierda y a la derecha para detectar la dirección de la luz más brillante.
Con unas tijeras, corta tres tiras de Dual Lock de 3,2 cm de largo y 2,5 cm de ancho. Retira el adhesivo y pega dos trozos en las esquinas bajo la placa base y un tercero en el centro.
Corta otras dos tiras de 3,175 cm de largo y 1,9 cm de ancho. Retira el adhesivo y pega las tiras a los dos motores. Asegúrate de que los motores son imágenes especulares el uno del otro cuando coloques el Dual Lock.
robot seguidor de luz usando arduino pdf
IntroducciónUn rastreador de luz sigue la dirección de la luz entrante. Se puede utilizar junto con los paneles solares que se programan para moverse en la dirección del sol para recibir la máxima cantidad de luz incidente. Los seguidores solares se basan en el mismo principio para captar el máximo de luz solar.
En este proyecto, vamos a construir un seguidor de luz utilizando resistencias dependientes de la luz para detectar la dirección de la luz entrante de la linterna de tu Smartphone y dos servomotores para alinear en esa dirección.
Paso 2: ComplementosAquí, el uso más popular del Seguidor Solar es cuando adjuntamos el Panel Solar. En el Panel Solar, si los Fotorresistentes están, entonces el panel solar comprobará qué parte de él está recibiendo más luz. Por lo tanto, ajustar la posición en consecuencia. Lo que resulta en una mayor eficiencia.
Paso 4: LógicaDesde el montaje, se puede observar que las cuatro LDRs están separadas por la pared. Cada LDR detectará la luz que cae en su sección. Numeraremos cada LDR como referencia. Si los dos servos están en la posición de 90 grados, entonces el girasol estará orientado hacia arriba como se muestra en el paso 12 del montaje. El LDR superior izquierdo se llamará LDR1. Del mismo modo, nombraremos LDR2 (arriba-derecha), LDR3 (abajo-izquierda) y LDR3 (abajo-derecha).