Motor a pasos arduino codigo
kit de motor paso a paso arduino
En el último proyecto de Arduino, hice un simple controlador de motor que controla la velocidad y la dirección de rotación del motor paso a paso bipolar de CD-ROM. Ahora voy a mostrar cómo hacer lo mismo con un motor paso a paso uinpolar.
Básicamente hay dos tipos de motores paso a paso: bipolar y unipolar. El motor paso a paso bipolar es un motor bifásico sin escobillas que tiene dos bobinas (devanados), este motor tiene 4 hilos (2 hilos para cada bobina).
El modo de medio paso es una combinación de los dos modos de paso completo (monofásico y bifásico). Este modo aumenta la precisión dividiendo cada paso por 2. requiere una potencia intermedia entre los modos monofásico y bifásico, el par también es intermedio.
Como se muestra en la figura anterior hay 4 bobinas: A, B, C y D. Estas bobinas tienen un punto común nombrado en la figura Alimentación del motor que se conecta al terminal positivo de la fuente de alimentación. Los otros terminales de la bobina están conectados a un controlador de motor.
En el modo de control de paso completo siempre se energizan dos bobinas al mismo tiempo de acuerdo con la siguiente tabla donde 1 significa que la bobina está energizada y 0 significa que no está energizada (se muestran ambas direcciones):
código del motor paso a paso a4988
El A4988 es un driver de microstepping para el control de motores paso a paso bipolares que lleva incorporado un traductor para facilitar su funcionamiento. Esto significa que podemos controlar el motor paso a paso con sólo 2 pines de nuestro controlador, o uno para controlar la dirección de rotación y el otro para controlar los pasos.
El Driver proporciona cinco resoluciones de paso diferentes: paso completo, paso de eje, cuarto de paso, ocho pasos y dieciseisavo de paso. Además, cuenta con un potenciómetro para ajustar la salida de corriente, una desconexión térmica por sobretemperatura y una protección de corriente de cruce.
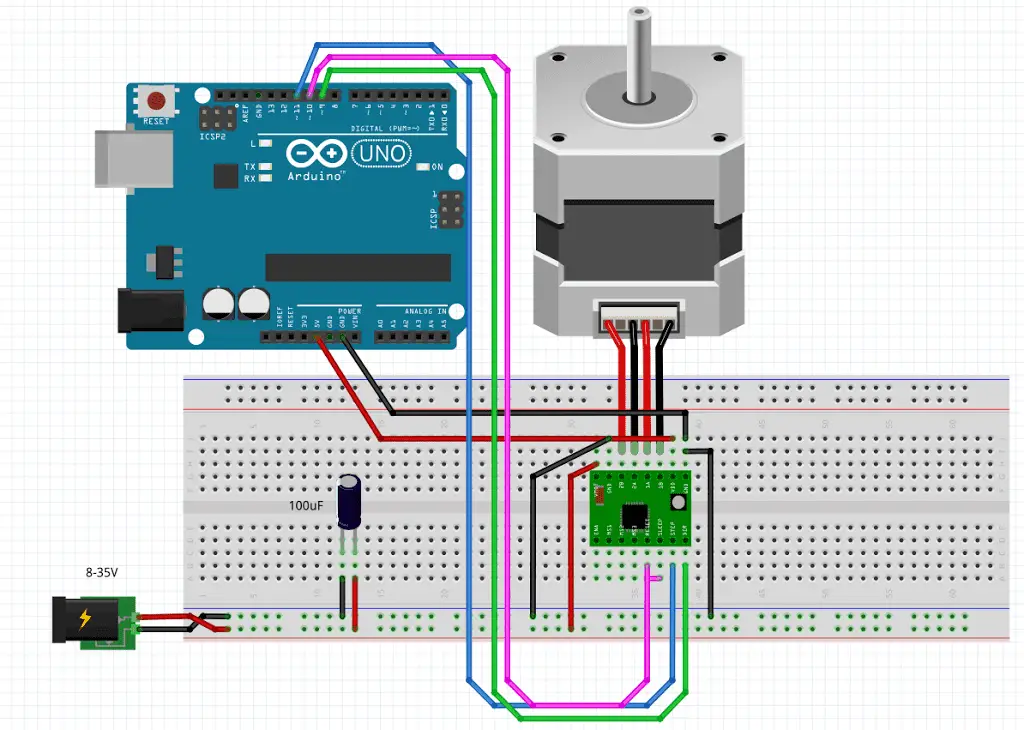
Ahora vamos a ver de cerca el pinout del driver y conectarlo con el motor paso a paso y el controlador. Así que vamos a empezar con los 2 pines en el lado derecho del botón para alimentar el conductor, los pines VDD y tierra que necesitamos para conectarlos a una fuente de alimentación de 3 a 5,5 V y en nuestro caso que será nuestro controlador, la placa Arduino que proporcionará 5 V. Los siguientes 4 pines son para conectar el motor. Los pines 1A y 1B se conectarán a una bobina del motor y los pines 2A y 2B a la otra bobina del motor. Para alimentar el motor utilizamos los siguientes 2 pines, Tierra y VMOT que necesitamos conectarlos a la fuente de alimentación de 8 a 35 V y también necesitamos utilizar un condensador de desacoplamiento de al menos 47 µF para proteger la placa del driver de los picos de tensión.
biblioteca de motores paso a paso de arduino
Cómo funciona el código: El sketch comienza con la definición de los pines de paso y dirección. Los conecté a los pines 3 y 2 de Arduino.La declaración #define se utiliza para dar un nombre a un valor constante. El compilador reemplazará cualquier referencia a esta constante con el valor definido cuando el programa sea compilado. Así que dondequiera que mencione dirPin, el compilador lo reemplazará con el valor 2 cuando el programa sea compilado.También definí una constante stepsPerRevolution. Debido a que configuré el controlador en modo de paso completo, lo establecí en 200 pasos por revolución. Cambia este valor si tu configuración es diferente.// Define las conexiones del motor paso a paso y los pasos por revolución:
En la sección loop() del código, dejamos que el motor gire una revolución lentamente en la dirección CW y una revolución rápidamente en la dirección CCW. Luego, dejamos que el motor gire 5 revoluciones en cada dirección con una velocidad alta. Entonces, ¿cómo se controla la velocidad, la dirección de giro y el número de revoluciones? // Establece el sentido de giro en el sentido de las agujas del reloj:
#include <AccelStepper.h>El siguiente paso es definir las conexiones del A4988 al Arduino y el tipo de interfaz del motor. El tipo de interfaz del motor debe establecerse en 1 cuando se utiliza un controlador de paso y dirección. La declaración #define se utiliza para dar un nombre a un valor constante. El compilador reemplazará cualquier referencia a esta constante con el valor definido cuando el programa sea compilado. Así que dondequiera que mencione dirPin, el compilador lo reemplazará con el valor 2 cuando el programa sea compilado.// Defina las conexiones del motor paso a paso y el tipo de interfaz del motor. El tipo de interfaz del motor debe ser fijado a 1 cuando se utiliza un driver:
2 código del motor paso a paso en arduino
El driver del motor paso a paso A4988 está pensado para accionar un motor paso a paso bipolar. Sólo por dos pines, puede controlar la dirección de rotación y los pasos de rotación. Cada señal enviada por el pin de paso de giro, el motor gira un paso. Las características principales son:
Antes de conectar el motor, debemos aplicar el límite de corriente del driver para asegurarnos de que esta corriente no dañe el driver y el motor. Esta corriente se mide midiendo la tensión de referencia del potenciómetro como en la siguiente fórmula. Sin embargo, no se puede decir que esta relación sea siempre cierta.Límite de corriente = VRef × 2Conecte primero el lado positivo del multímetro al potenciómetro y el lado negativo del multímetro a GND. La tensión que se mide es VRef. Multiplicándolo por 2 nos da el límite de corriente. Además, según la hoja de datos, si el controlador está en modo de paso completo, la corriente de la bobina es el 70% de la corriente limitada:Corriente del bobinado = Límite de corriente × 0,7